飞机航姿系统与机载防撞系统的交联设计与实现(自动化)
田建学,张鹏明,贾绍文,于潞
(海军航空工程学院青岛校区,山东青岛266041)
摘要:为了减少和避免飞机相撞的危险,飞机上需要加装机载防撞系统。然而机栽防撞系统需要的航向姿态信号与飞机的航姿系统所提供的航向姿态信号不一致,因此通过设计航姿信号变换系统的方法实现飞机航姿系统与机载防撞系统的交联。设计的航向姿态信号变换系统已成功应用于多型运输机机载防撞系统改装工程,实现了机载防撞系统与机载设备的交联,提高了飞机空中防撞能力。
关键词:航姿系统;机载防撞系统;接口;信号;交联
中图分类号:V243 文章编号:1006 - 2394( 2016) 06 - 0020 - 04
0 引言
为了符合国际民航组织(ICAO)和中国民用航空总局关于空中交通管制的要求,提高飞机空中防撞能力,国内多型飞机需要加装机载防撞系统。机载防撞系统需要飞机的无线电高度、气压高度、航向/姿态信息,但是载机上这些信息源提供的信号格式与机载防撞系统的需求不一致,因此不能直接实现交联,需要对有关信号进行变换才能满足机载防撞系统的要求。
本文就飞机加装机载防撞系统的航向/姿态信号变换系统进行讨论,
1 航姿信号变换原理
综合考虑飞机航向、姿态系统信号的输出格式和机载防撞系统的接口要求,实施信号变换时将载机的航向信号、姿态(包括俯仰和横滚)信号经同步机信号/数字信号(或模/数)变换、编程等,合成处理为一路高速ARINC429信号。航向/姿态信号变换系统采用模块结构设计,便于维修。
1.1 A型飞机航姿信号变换原理
A型飞机航向、姿态(俯仰和横滚)三路同步机信号变换到ARINC429数据的结构框图如图1所示,其基本原理是通过同步机/数字信号变换单元把航向、俯仰和横滚三路同步机信号变换成角度数字信号,并输入到51单片机控制单元,在单片机中把这三路角度数字信号合成ARINC429格式的数据,并写入ARINC429控制器,以一路高速( 100 kbit/s)的ARINC429数据流从ARINC429发送器发送至机载防撞系统。
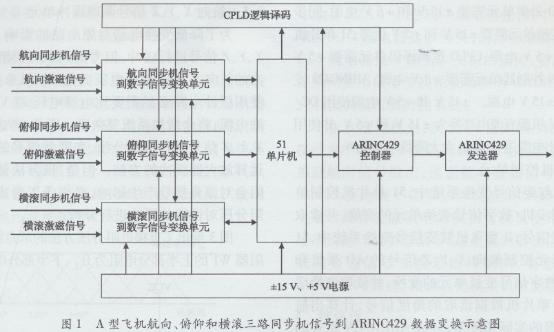
该变换系统共分为八个模块:±15 V、+5 V电源单元,51单片机控制单元,CPLD逻辑译码单元,航向同步机信号到数字信号变换单元,俯仰同步机信号到数字信号变换单元,横滚同步机信号到数字信号变换单元,ARINC429控制器单元,ARINC429发送器单元。
1.2 B型飞机航姿信号变换原理
B型飞机的航向信号是通过环形滑线变阻器输出的X、Y、Z直流信号,而不是同步机信号,这样对于该型飞机的航向姿态信号变换不仅包括同步机信号到ARINC429数据的变换,还包括环形滑线变阻器输出的X、Y、Z信号到ARINC429数据的变换。
图2是B型飞机航向、俯仰和横滚信号变换到ARINC429数据的原理框图,其基本原理是通过同步机/数字信号变换单元把俯仰和横滚两路同步机信号变换成角度数字信号,通过信号调理缓冲单元把环形滑线变阻器输出的X、Y、Z直流航向信号变换成AD可以采集的模拟信号,并进行AD采集,把采集结果和变换完成的角度数字信号一并输入到51单片机控制单元,在单片机中对航向的X、Y、Z信号进行计算得出对应的角度同俯仰和横滚两路角度数字信号合成ARINC429格式的数据,并写入ARINC429控制器,以一路高速(100 kbit/s)的ARLNC429数据流从ARINC429发送器发送至机载防撞系统。
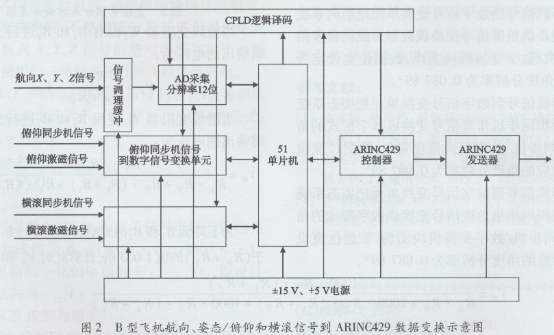
该变换系统共分为九个模块:±15 V、+5 V电源单元,51单片机控制单元,CPLD逻辑译码单元,航向X、Y、Z信号调理缓冲单元,航向X、Y、Z信号AD采集单元,俯仰同步机信号到数字信号变换单元,横滚同步机信号到数字信号变换单元,ARINC429控制器单元,ARINC429发送器单元。
2 航姿信号变换系统的单元设计
A型飞机和B型飞机航姿信号变换原理基本一致,主要差别是由于航向信号格式不一致导致的航向信号处理方式不同。A型飞机航姿信号变换系统中的航向同步机信号到数字信号变换单元,在B型飞机航姿信号变换系统中由两个单元进行替代,即航向X、Y、Z信号调理缓冲单元,航向X、Y、Z信号AD采集单元。下面分别就各个单元的设计进行说明。
2.1 +15 V、+5 V电源单元
电源单元为整个变换系统提供所需±15 V和+5 V电源。航向X、Y、Z信号调理缓冲单元需要±15 V电源;航向X、Y、Z信号AD采集单元需要±15 V和+5 V电源;同步机/数字信号变换单元需要±15 V和+5 V电源;51单片机控制单元需要+5 V电源;CPLD逻辑译码单元需要+5 V电源;ARINC429控制器单元需要+5 V电源;ARINC429发送器单元需要±15 V电源。±15 V和+5 V电源使用DC/DC技术把28 V机载直流电变换为±15 V和+5 V,并使用1T型网络对输出电源进行滤波,大大降低电源噪声。
2.2 51单片机控制单元
A型飞机航姿信号变换系统中,51单片机控制单元控制三路同步机/数字信号变换单元的变换,并读取变换后的角度信号;B型飞机航姿信号变换系统中,51单片机控制单元控制航向X、Y、Z信号的AD采集和两路同步机/数字信号变换单元的变换,并读取变换后的角度信号。单片机根据读取的角度信号,计算出航向、俯仰和横滚的实际角度值,合成ARINC429格式的数据,然后写入ARINC429控制器进行发送。
2.3 CPLD逻辑译码单元
CPLD逻辑译码单元实现单片机到AD采集单元、同步机/数字信号变换单元和ARINC429控制器等的控制信号的逻辑译码,保证单片机数据总线工作正确、可靠。
2.4航向/俯仰/横滚同步机信号到数字信号变换单元
航向同步机信号到数字信号变换单元把航向系统输出的模拟同步机角度信号变换成数字形式的角度信号,使用同步机/数字变换模块实现,数据位宽设定为12位,对应的角度分辨率为0. 087 890。
俯仰同步机信号到数字信号变换单元把姿态系统输出的俯仰模拟同步机角度信号变换成数字形式的角度信号,使用同步机/数字变换模块实现,数据位宽设定为12位,对应的角度分辨率为0. 087 890。
横滚同步机信号到数字信号变换单元把姿态系统输出的横滚模拟同步机角度信号变换成数字形式的角度信号,使用同步机/数字变换模块实现,数据位宽设定为12位,对应的角度分辨率为0. 087 890。
2.5航向X、Y、Z信号调理缓冲单元
为了降低变换电路对原电路的影响,需要对航向X、Y、Z信号进行缓冲,但考虑到从环形滑线变阻器输出的航向X、Y、Z信号电压变化范围从0到电源电压,使用缓冲电路必然需要比电源电压27 V还要高的辅助电源,将会增加系统复杂度。因此,考虑使用对航向X、Y、Z信号进行电阻分压,先降低信号的幅度再使用运算放大器缓冲的方法。但是,该方法使用的分压电阻会对原先信号产生影响,必须予以考虑。下面就电阻分压对性能的影响进行分析。
图3给出了直接电阻分压方法的示意图。设滑线变阻器W1的上半部分电阻为R上,下半部分电阻为R下。
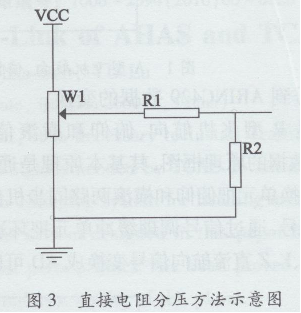
当滑线变阻器W1没有R1和R2进行分压时,滑动端输出的电压为:

当滑线变阻器W1使用R1和R2进行分压时,滑动端输出的电压为:

可见,加入分压电阻R1和R2后对原先影响可忽略。
考虑到环形滑线变阻器输出的航向X、Y、Z信号的输出阻抗与环形滑线变阻器的阻值密切相关,环形滑线变阻器的阻值约为500 Q,也就是说航向X、Y、Z信号的输出阻抗在0~ 500 Q之间变化,也就是RW= R上+R下
![]()
2.6航向X、Y、Z信号AD采集单元
2.6.1航向角的计算
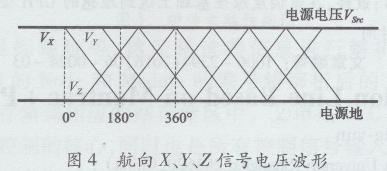
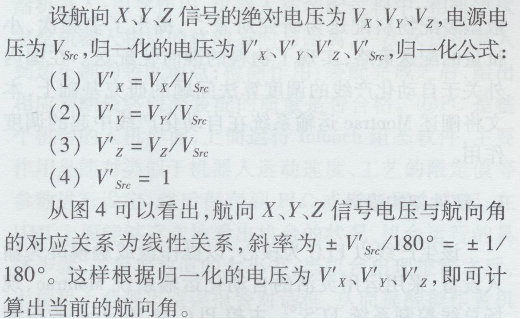
AD采集单元完成航向X、Y、Z信号从模拟量到数字量的变换。根据环形滑线变阻器的特性可以分析得出航向X、Y、Z信号在00—3600内的电压波形曲线,而且在一个确定的角度时,对应的航向X、Y、Z信号电压也是确定和唯一的,根据这一特征,若得知航向X、Y、
Z信号的电压就可以计算得出此时的航向角。航向X、Y、Z信号电压波形如图4所示。
2.6.2航向X、Y、Z信号补偿算法
航向X、Y、Z信号电压变化范围从0到电源电压。由于电源电压的不稳定就会使航向X、Y、Z信号电压相应发生变化,为了有效弥补电源电压的波动影响,需要对电源电压也进行AD采集,在51单片机控制单元内对航向X、Y、Z信号进行补偿,提高航向角的计算精度。因此,在计算航向角时,不使用航向X、Y、Z信号的绝对电压,而是把航向X、Y、Z信号的绝对电压相对于电源电压归一化,使用归一化的电压计算飞机的航向角。
2.7 ARINC429控制器单元
ARINC429控制器单元实现ARINC429数据的打包发送和接收以及与外围控制器的接口逻辑等功能。
2.8 ARINC429发送器单元
ARINC429发送器单元实现ARINC429数据从TTL电平到±12 V的电平变换、输出驱动,以及串行数据边沿斜率的控制等。
3 航向姿态系统与机载防撞系统的交联实现
在A型飞机上,航姿系统输出的航向、姿态信号为同步器信号,为便于维护和施工,航向、姿态信号集中取自HZX-1中的EJ-7继电器盒,其中航向通道信号取自EJ-7继电器盒E插头,俯仰和倾斜通道信号取自EJ-7继电器盒T插头。飞机的航向、姿态同步器信号经航向姿态信号变换系统转换为ARINC429(高速)格式后提供给机载防撞系统。
在B型飞机上,从5—6框间的rI/IK-1型磁罗盘接线盒中的2679接线排将环形电位器输出的三相模拟磁航向信号取出,送至航向姿态信号变换系统;从18—19框地板下2379、2382、2383、2419、2435接线排上取出具有应急供电的供正驾驶员使用的(左)远读地平仪的飞机姿态信号,送至航向姿态信号变换系统;航向姿态信号变换系统将航向、姿态信号转换为ARINC429(高速)格式后提供给机载防撞系统。
4结束语
通过航向姿态信号变换系统对飞机的航向、俯仰和横滚信号进行变换处理后,就可以在机载防撞系统和原机航姿系统都不改变自己原有接口的情况下实现交联,可大大降低系统(设备)改进的技术难度和经费成本,也可加快机载防撞系统改装的周期和进度。本文所述航姿系统与机载防撞系统的交联关系已经在A、B两型运输机上得到验证,研制的航姿信号转换系统成功实现了进口机载防撞系统与原机航姿系统的交联关系,该型运输机的空中防撞能力得到有效提高。