视觉记忆型次任务对驾驶绩效及安全的影响*(安全)
吴 玲1,路巧珍1,朱 彤2,刘浩学2
(1.长安大学汽车学院交通运输系,陕西西安710064;2.汽车运输安全保障技术交通行业重点实验室,陕西西安710064)
摘要:为研究视觉记忆型次任务对驾驶绩效及安全的影响,采用对未知内容的记忆任务和对已知内容的再认任务分别表征工作记忆和长时记忆过程,构建多组不同难度的次任务,基于标准换道试验环境LCT进行双任务研究。提取并分析驾驶人执行不同任务时车道保持、换道控制等指标的差异以及次任务绩效,基于主客观数据构建综合评判模型。结果表明:双任务驾驶条件下,车辆平均路径偏差、方向盘平均转向角、车道偏移次数指标增大,正确换道比例减小,感知负荷增大,总绩效下降。困难工作记忆组与简单工作记忆组相比,随着任务难度增大,换道控制绩效下降,感知负荷增大,总绩效下降36. 1%;困难再认组与工作记忆组相比,车道保持绩效、换道控制绩效提高,感知负荷下降,总绩效提高50%;简单再认组与工作记忆组相比,总绩效变化不大;困难工作记忆组综合绩效最低。上述结果说明:随着次任务难度增大,总绩效下降,但将对未知内容的工作记忆过程转化为对已知内容的再认过程时,总绩效明显提升,这一特点在任务难度较大时更为显著。
关键词:交通安全;驾驶人;次任务;记忆;绩效;综合评价模型
中图分类号:X951 doi: 10. 11731/j.issn.1673 -193x.2016. 05. 027
0 引 言
近年来,车载信息系统、驾驶人辅助系统等人机交互系统的应用更为广泛,驾驶过程中由于使用这些智能功能,占用了驾驶人心理资源。根据心理资源有限性理论及Wickens的多资源理论,观察车载导航信息、手持通话或免提通话、娱乐服务等次任务与驾驶主任务形成竞争,从而产生不同程度的负荷。次任务分为多种类型,如视觉、听觉、认知等次任务或其结合。记忆型次任务并不影响驾驶人的视线,然而,当记忆负荷超过一定阈值时,会延缓紧急情形下驾驶人观察、决策和反应能力,从而导致车辆失控,引发交通事故。因此,有必要以驾驶绩效为量测指标,分析研究记忆型次任务对于驾驶人行为及安全的影响。
心理学研究主要将记忆划分为工作记忆和长时记忆。工作记忆负责将外界环境信息转换成人脑处理合适的形式,从而进行加工和存储。其保持的时间不长,只有在不断复述的情况下才能保持。而长时记忆指永久性的记忆存储,一般能保持很长时间。它的信息是以有组织的状态被贮存起来。工作记忆从编码方式可分为语言工作记忆和视觉工作记忆,而长时记忆依照所贮存的信息类型分为情景记忆和语义记忆。人机系统交互过程中,超过90%的感知信息来源于视觉通道,长时记忆中以运用语义记忆为主,但车载信息系统任务的具体操作方式对记忆资源的消耗程度仍未得到研究。
已有较多学者讨论了记忆负荷的影响。张斌等提出工作记忆在选择性注意任务中的认知控制作用,此外相关研究还探讨了长时记忆的神经机制,工作记忆对无意注意、注意缺陷等行为的注意机制影响和视觉工作记忆容量资源模型等。沈模卫等采用n - back范式,讨论了不同视觉工作记忆负荷对于反应时、辨别力、主观负荷的影响。上述研究多从心理学基础理论出发,聚焦于人的注意行为和理论模型,对于驾驶相关的反应、识别、决策等行为的动态试验研究较少。
综上所述,本文在LCT( Lane Change Task)标准仿真试验环境下进行双任务研究,采用对未知内容的记忆任务和对已知内容的再认任务分别量测工作记忆和长时记忆对驾驶行为影响,通过控制次任务难度,对比仅执行驾驶任务和同时执行驾驶任务与次任务情况下车辆运行状态信息,结合反应时、主观负荷评分值,以不同任务组各指标的变化规律定量描述视觉记忆负荷对驾驶绩效的影响,并构建基于综合评价函数法的绩效量化模型,最终以单一指标计算各任务组总绩效。本研究对于优化人机交互系统设计,促进车内次任务研究、驾驶人主动安全研究,具有理论意义与应用价值。
1 LCT标准试验环境与试验设计
1.1LCT仿真试验环境
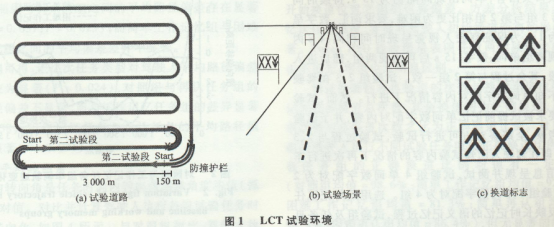
LCT(换道试验)是国际标准化组织ISO规定的仿真环境,专用于测量驾驶人在执行车载信息任务时的绩效。相关研究已经表明LCT在量化双任务状态下,驾驶主任务绩效降低和次任务的需求方面具有较高的信度和效度。LCT试验环境中,驾驶主任务要求被试以60 km/h的速度,沿三车道直线道路行驶,并根据试验标志进行换道,没有其他交通干扰。每段横向直线道路为一个试验路段,试验路段长度均为3 km。编号0~9共10个试验路段,两个试验段连接处则为缓冲过渡段,具体试验段几何参数设计如图1(a)所示。车道宽为3. 85 m,共左、中、右三车道。以150 m为间隔,试验段两侧设置有换道标志,但驾驶人只有在距离换道标志40m之内时才可看清标志。场景如图1(b)所示。每个试验段包含18对换道标志,至少5种随机的换道方式。以图1(c)举例说明驾驶人如何根据试验标志换道。若试验中出现图1(c)上图,则要求驾驶人看清试验标志后,尽快换道至最右侧车道,同理,若出现1(c)中图、下图则要求尽快换道至中间车道、左侧车道。试验前告知驾驶人看清试验标志后,以最快的速度完成换道,并行驶在当前车道中间。仿真车辆的位置由方向盘控制,速度则由踏板控制。结合驾驶人在无换道任务时车道保持绩效和有换道任务时换道控制绩效,则可以分析双任务情况下驾驶总绩效。
1.2试验设计
采取有偿试验、自愿参与的原则招募被试。本文试验研究的目的为优化车载信息系统设计,因视觉记忆任务的特殊性和使用车载信息系统人群的集中性,选取被试时未考虑50岁以上的驾驶人(可能存在记忆衰退情况),并要求被试认识英文字母。最终确定包括不同职业、年龄、性别和驾龄的20位驾驶人作为被试。其中包括13名男性和7名女性,被试平均年龄29岁,平均驾龄3.1年。所有被试均已获得机动车驾驶证,视力或矫正视力达到相关要求。使用单屏驾驶模拟器加载LCT仿真试验环境,并采用座椅、方向盘、踏板等设备控制车辆。同时,使用Ipad mini作为虚拟车载信息服务设备,播放试验次任务。
试验采用2(视觉记忆任务类型)×2(视觉记忆任务难度)的组内比较试验方案。每个被试需完成全部6组任务,所有被试完成一组试验任务后,休息30分钟,方可进行下一组试验,驾驶人交替进行每组试验。对未知内容的记忆任务为工作记忆任务,而对已知内容的再认过程则表征长时记忆任务。试验要求被试首先完成LCT驾驶任务,然后进行不同类型、难度的次任务适应训练,最后被试进行双任务训练,即在LCT驾驶过程中同时执行次任务,直至被试明确试验过程。正式试验包含6组试验,第1组和第6组为对照试验组,被试只需完成LCT换道试验;第2—5组均在换道任务的同时伴随有次任务,本文中次任务采用Anderson提出的配对记忆任务。第2组为简单记忆试验,即在LCT试验开始后30 s,车载信息设备相继呈现两组英文单词及与之相关的数字,每个单词和数字的呈现时间分别为2s,两组呈现间隔为15 s,即单词、数字、间隔、单词、数字。随即提醒被试进入测试阶段,要求被试回忆单词对应的数字并尽快口头回答,单词出现间隔仍为15 s,持续时间2s;而第3组与第2组相比更为困难,要求词汇、数字呈现时间为1s,为保证驾驶人视觉呈现时间相同,4s内连续呈现两组单词、数字,15s后再出现两组,随后进入测试阶段,其余过程与第2组一致。试验组2、3在驾驶人完全不知单词数字配对内容情况下进行。然而,试验组4、5要求被试提前记忆单词数字配对内容,并予试验前进行考察,全部答对方可进行试验,试验过程与2、3组一致,即在驾驶人已知试验内容的情况下再次进行车载设备信息呈现并测试,试验组4单词数字配对为2组,而试验组5单词数字配对为4组。选用配对记忆任务主要反映长时记忆的语义记忆过程,试验组及任务见表1。
每组试验结束后,要求被试填写NASA - TLX量表,对任务负荷进行主观打分。NASA - TLX量表从心理要求、生理要求、时间要求、作业成绩、努力和挫折水平六个维度测量任务负荷。为避免学习效应,每组试验的路段从0~9个试验段中随机抽取,除已知任务组,每组单词数字配对随机选择。
2 主任务绩效指标特性分析
2.1 车辆运行曲线分析
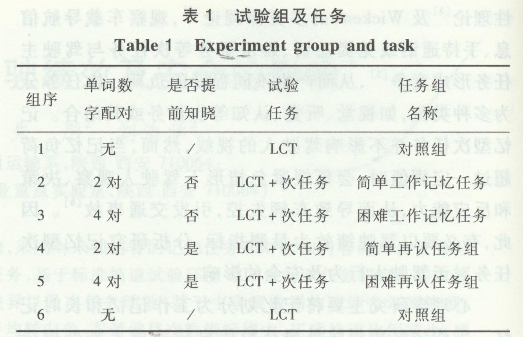
横向偏移距离表示的是车辆中心与道路的横向相对位置。取同段数据进行对比,该数据包含完整的两次换道,即车辆从中央车道换至右侧车道、又从右侧车道换至中央车道。换道过程中的横向位置随时间变化的曲线如图2所示。观察曲线可以发现,执行工作记忆次任务和对照组相比,车辆运行状态存在明显差异。执行简单工作记忆任务时,车辆轨迹变化曲线与对照组曲线趋势基本一致,但整体滞后,即驾驶人反应较慢,保持车道的能力差异不显著。困难工作记忆任务中,驾驶人未对第一次换道做出反应,即遗漏换道信息,车辆轨迹变化曲线波动较大,车道保持能力较弱。
2.2 车道保持和换道控制指标特性分析
根据车辆轨迹变化特点和驾驶任务需求,提出车道保持特性指标,包括平均路径偏差与平均转向角。结合换道绩效评价,给出换道控制特性指标,即车道偏移次数、初始换道距离、正确换道比例。
2.2.1 平均路径偏差
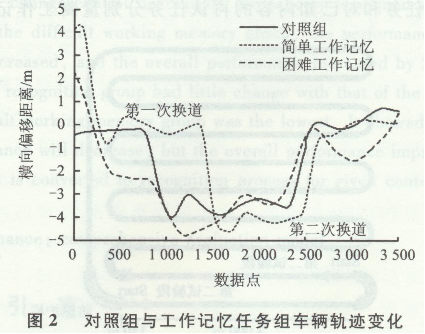
平均路径偏差是理想换道路径与实际换道路径之间的面积除以行驶距离所得的结果。对比驾驶人执行各组任务时的平均路径偏差,如图3所示。可以看出,平均路径偏差能够很好地区分对照组与工作记忆任务组,但简单工作记忆组与困难工作记忆组差别不大。与此同时,对比简单再认与工作记忆组、困难再认与工作记忆组,平均路径偏差均值明显减小,数据分布更为集中。
采用单因素方差分析,定量判断次任务难度对于平均路径偏差的影响。K-S检验数据符合正态分布(P=0. 904)且满足方差齐性(P=0.124),游程检验确定各组数据满足独立性(P =0.397)。单因素方差分析结果表明,次任务难度对驾驶人平均路径偏差的影响较为显著(P=0.029)。选用Tukey HSD检验法判断两两之间差异,对照组与其余两组之间的平均路径偏差存在显著差异(P=0.037;P=0.025);而简单工作记忆组与困难工作记忆组之间的平均偏差差异不显著。
同理可得,记忆次任务类型对驾驶人平均路径偏差的影响较为显著(P=0. 024),对照组与再认任务组的平均路径偏差不显著,而与工作记忆任务组的差异显著(P =0.038),工作记忆任务与再认任务的平均路径偏差较为显著(P=0.031)。
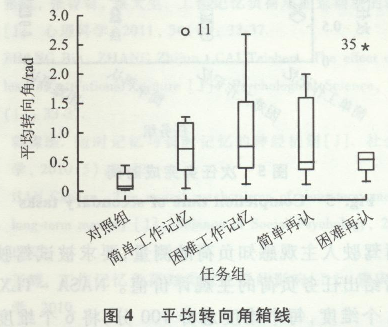
2.2.2 平均转向角
平均转向角是任务时间内转向盘偏移角度均值(弧度)的绝对值。对比并计算驾驶人执行各组试验任务时的平均转向角,如图4所示。与对照组相比,驾驶人执行次任务时平均转向角明显更大,而困难工作记忆组与简单工作记忆组相比,平均转向角均值差异不大,但数据更加离散。而再认组与工作记忆组相比,平均转向角均有所减小。
方差分析结果表明记忆型次任务难度、类型对驾驶人平均转向角的影响较为显著(P=0.047;P=0.041)。对次任务难度的Tukey HSD检验结果表明,对照组与其余两组之间平均转向角存在显著差异(P=0. 042;P=0. 027);简单工作记忆、困难工作记忆任务组之间差异不显著。针对次任务类型,Tukey HSD检验结果表明,对照组与工作记忆组、再认组之间平均转向角差异较显著(P=0.039;P=0.045),而再认组与工作记忆组之间差异不显著。
2.2.3 换道控制指标分析
定义驾驶人实际驾驶路径超出LCT理论界限的次数为车道偏移次数。对比并计算对照组与驾驶人执行不同试验任务时的车道偏移次数后发现,相对于对照组,双任务下车道偏移次数平均值增大,困难工作记忆任务组车道偏移次数平均值最大。对比工作记忆与再认任务,困难再认任务组车道偏移次数显著减少。
初始换道距离是换道标志出现位置与驾驶人实际开始换道位置之间的位移偏差。方差分析结果表明记忆次任务难度、类型对驾驶人初始换道距离的影响不显著。Tukey HSD检验结果表明任意两试验组之间差异也不显著,均值也无明显区别。
错过换道标志再换道的次数与换错车道次数总和记为错误换道总次数,其余换道则为正确换道,正确换道次数与总换道次数之比为正确换道比例。对比对照组与驾驶人执行不同试验任务时的正确换道比例,发现各任务组的正确换道比例均值有一定区别(对照组均值=98.6%;简单工作记忆组均值= 92.1%;困难工作记忆组均值=81.3%;简单再认组均值=94.5%;困难再认组均值= 86.4%),但无显著的统计学差异。
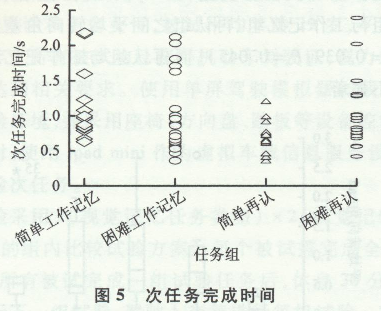
3 次任务完成时间与主观评价测量
在分析主任务绩效指标特性的同时,也进行了次任务绩效的量测。以次任务完成时间量化次任务绩效,如图5所示。从图5中可以看出,不同任务组完成时间差异不明显,即在本文试验条件下,次任务绩效变化不大。这也说明被试在双任务条件下,对任务的优先性选择差异不明显,有利于直观比较驾驶任务绩效。
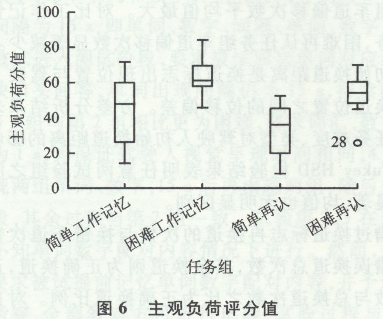
对驾驶人主观感知负荷的测量,要求被试驾驶人在试验后给出任务负荷的主观评价值。NASA - TLX量表包含6个维度,每个维度总分100分,将6个维度的得分取均值作为量测分值,分值越高,表示驾驶人主观负荷越大。对比不同记忆次任务难度、类型条件下NASA- TLX量表得分,如图6所示。随着工作记忆任务难度的增大,驾驶人主观感知到的负荷增大,数据分布更加集中。而当工作记忆过程转化为再认过程时,主观负荷均有所下降。
4 综合绩效评价模型
综合评价函数法是利用统计分析进行综合评价的方法。该方法的基本思路是通过对每个技术方案各项指标值的统计分析,形成综合评价函数的数学模型;再将每个方案的各项指标值带入综合评价函数,求得每个方案的综合评价函数值,根据该值的大小比较各方案的优劣,为后续方案的决策、设计提供科学的依据。
绩效影响评价指标可分为正向指标和逆向指标,正向指标取值越大越好,逆向指标取值则越小越好。本文中除正确换道比例为正向指标,其余均为逆向指标。采用倒数法将正向指标转换为逆向指标,每个技术方案对应一组试验条件,因次任务对初始换道距离的影响既无描述性区别,也无统计性差异,故取6个指标分别为平均路径偏差、平均转向角、车道偏移次数、正确换道比例、次任务完成时间、NASA - TLX量表得分。运用MA-TALB最终计算得到不同任务组总绩效如图7所示,计算指标为逆向指标,所以绩效值越大表示绩效越差。
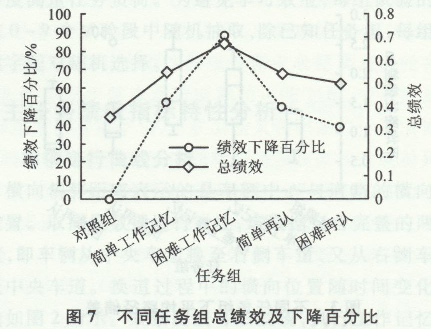
对比驾驶人执行各组记忆型任务时的总绩效,可以看出随着工作记忆任务难度增大,总绩效下降,困难工作记忆组绩效最差;简单工作记忆任务与再认任务相比,绩效变化不大,而困难再认任务相对于工作记忆任务,绩效明显有所改善。从绩效下降百分比可以看出相
似的规律,困难工作记忆组绩效下降百分比最大,接近90%;将困难记忆任务中的未知内容转化为已知内容时,即工作记忆过程转化为再认过程时,绩效提高50%;简单工作记忆任务与再认任务差异不明显。
5 结 论
1)对比驾驶人执行简单工作记忆次任务与困难工作记忆次任务,通过分析车辆轨迹变化曲线可知.前者反应变慢,但车道保持能力无明显变化;后者驾驶人基本没有反应,车辆轨迹曲线变化曲线波动较大。
2)视觉记忆型次任务难度、类型对车道保持特性指标影响显著。执行次任务时平均路径偏差、平均转向角增大,表现为车道保持绩效下降;简单工作记忆组与困难工作记忆组的车道保持绩效无显著差异,即难度增大,绩效变化不大;而再认组与工作记忆组相比,平均路
径偏差与平均转向角均有所减小,前者差异较显著。
3)双任务下车道偏移次数增多,正确换道比例减小,初始换道距离无显著变化;困难工作记忆任务组车道偏移次数平均值最大,正确换道比例最低;对比工作记忆与再认任务,困难再认任务组车道偏移次数显著减少,正确换道比例增大。
4)不同视觉记忆次任务组完成时间差异不明显,反映了次任务绩效无显著差异,有利于比较主任务绩效;NASA - TLX量表得分结果表明随着记忆次任务难度增大,主观感知负荷增大。
5)综合函数模型结果表明,驾驶人执行工作记忆任务时总绩效有所下降;困难工作记忆组绩效下降百分比最大,接近90%;将困难记忆任务中的工作记忆过程转化为再认过程时,绩效提高约50%;简单工作记忆任务与再认任务相比,综合绩效差异不明显。
以上研究结果说明当车载信息系统操作需要消耗记忆资源时,直接调取比从外界呈现再加工具有更高的效率,这一特点在加工复杂信息时表现更明显。因试验条件限制,笔者选取被试对象人群较集中,样本量较小,后期可考虑加大样本量,并采取实车道路试验,以实际观测到的指标特性判断视觉记忆型次任务对驾驶绩效及安全的影响。