基于距离交汇法的海上动态定位误差分析(通讯)
杜亚杰, 刘爱东, 孙海文
(海军航空工程学院,山东烟台264001)
摘要:舰载机在着舰过程中需要清楚舰载机实时的真实空间位置。针对激光测距机距离交汇定位的方法,对该定位方法进行误差分析。误差来源分为两类,一类是激光测距机的测距误差,另一类是距离交汇定位方法的误差。以激光测距的原理为基础,分析影响激光测距的误差源并给出误差修正公式。以距离交汇定位方法模型为基础,分析各误差产生原因并给出用该方法解算时实际值与理论值的偏差。分析结果表明,当舰栽机距离航母1km时,定位误差在分米级,能够满足定位精度的要求。
关键词:激光测距;距离交汇;定位;误差分析;舰载机
中图分类号:TN247; P207 文章编号:1671 - 637X( 2016) 04 - 0081 - 04
0 引言
舰载机在航母上着舰,难度大、风险高,被称为“刀尖上的舞蹈”,因此,舰载机在着舰过程中,需要清楚舰载机实时的真实空间位置。介绍了空间测边交汇的具体解法,能够实现定位的要求。但是,航母在海上遂行军事任务,工作环境十分复杂且恶劣,在海上进行动态定位时存在很多不利因素影响距离交汇定位方法的精度。因此,对距离交汇法海上动态定位进行误差分析有很大的意义。
1 距离交汇定位方法模型
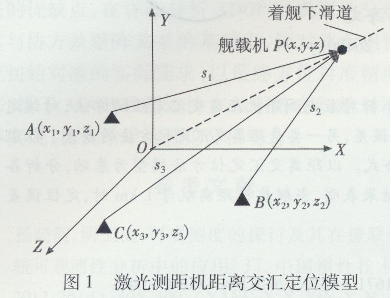
在舰载机起落架上安装激光合作目标,在航母甲板上找3个已知点安装激光测距机,采用电视或红外跟踪摄像机实时跟踪目标,用激光测距机测量已知点到舰载机的距离,采用距离交汇的方法对舰载机进行定位。具体的定位模型如下:以理想着舰点0为坐标原点,以平行于着舰跑道中心线指向舰艉的方向为X轴正向,垂直于甲板面向上方向为Y轴正向,Z轴方向符合右手法则,建立坐标系如图1所示。
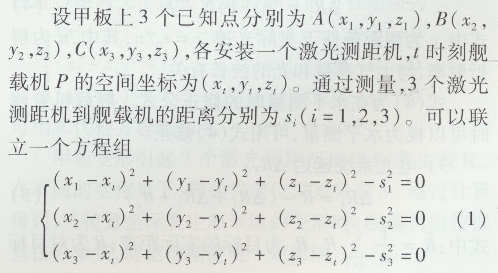
方程组(1)的解即为t时刻舰载机的位置。方程组是一个非线性高次代数方程组,研究了这类方程组的求解方法,在这里不再详细介绍。
2激光测距机测距误差分析
2.1测距误差源
激光测距机测距误差可以表示为:
![]()
式中:![]() 为激光测距总的系统误差;
为激光测距总的系统误差;![]() 为计数器频率发生频偏使其对应的假想光速与真空光速产生偏差而引起的测量误差;
为计数器频率发生频偏使其对应的假想光速与真空光速产生偏差而引起的测量误差;![]() 为由于大气密度的不同,光在大气中的传播速度发生变化,与真空中的光速不同而引起的大气折射误差;
为由于大气密度的不同,光在大气中的传播速度发生变化,与真空中的光速不同而引起的大气折射误差;![]() 为由发射脉冲和接收脉冲两路电子线路延迟时间不同引起的电光系统延迟误差。
为由发射脉冲和接收脉冲两路电子线路延迟时间不同引起的电光系统延迟误差。
此外,激光合作目标的特性也会对测距的精度产生一定的影响。
2.2系统误差的修正
1)计数器的频率修正![]() 。
。
该误差与计数器频率有关,计数器频率增大,误差则减小。
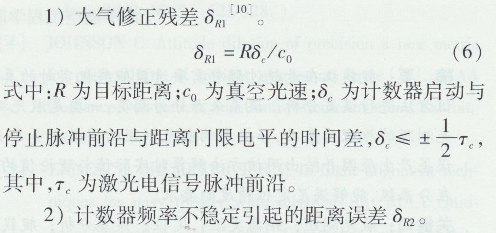
2)大气修正![]() 。
。

式(4)为在水平测量时的修正公式。舰载机着舰时可以视为水平测量,可用式(4)修正。


2.3随机误差估算
脉位误差是指启动脉冲与停止脉冲的触发前沿不一致而产生的误差。
3 距离交汇动态定位误差分析
假设3个激光测距机的坐标(单位为m)分别为(0,0,-15),(- 10,0,10),(- 135,0,0),舰载机在距理想着舰点水平距离为1km的位置,此时舰载机的坐标(单位为m)为( 1000,69. 927,0)。以下误差分析均在此假设位置上进行解算。
3.1时间不同步误差
根据距离交汇定位方法的原理可知,对舰载机进行定位,需要测量同一时刻3个激光测距机与舰载机之间的距离。但在实际情况中时间不可能完全一致,3个激光测距机的测量会出现时间不同步的问题,而解算时仍按照时间同步来处理,因此会产生误差。
激光测距机的测距原理是通过测量激光光束在被测距离往返一次的时问,间接算出被测距离,即

假设以激光测距机A测量时刻为基准,激光测距
在不同的时间延迟下,经解算,舰载机位置误差见表1。通过计算发现,当时间延迟在10 ps内时,俯仰误差和方位误差均在分米级,对定位精度有一定影响。

3.2空间不同步误差
激光测距机在进行距离交汇时,3个激光测距机需要对同一位置的舰载机进行测距,但是,舰载机在着舰过程中位置是实时发生变化的,实际测量时,3个激光测距机的测量会出现空间不同步的现象,因此会产生一定误差,如图2所示。
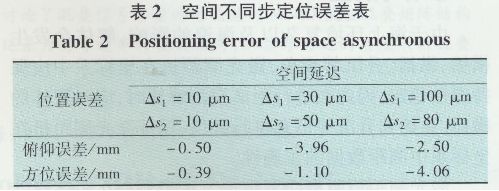
经过分析,空间不同步主要是由于3个激光测距机发射的激光脉冲到达舰载机的时间不一致引起的,经计算,由此产生的空间延迟距离在十微米级甚至更小。在不同的空间延迟下,舰载机定位误差见表2。通过计算得到,由于空间不同步产生的定位误差很小(毫米级),对定位精度的影响可以忽略。
3.3甲板变形误差
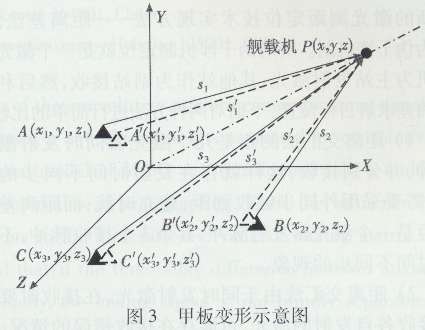
航母在海上航行过程中,会受到海水的浮力以及海浪的冲击力,航母甲板在各种外力的综合作用下会发生一定量的变形,这种变形在一定程度上会影响系统的测量精度。3个激光测距机的位置也随甲板变形而发生变化,如图3所示。

可用来代替方程组(1)。
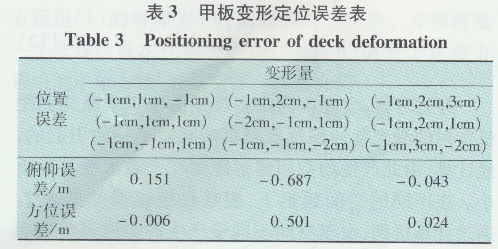
甲板变形引起3个激光测距机的坐标发生变化,在不同的变化量下,舰载机定位误差见表3。通过计算得到,当位置坐标发生厘米级的变形时,舰载机定位误差在分米级,对定位精度有一定影响。
4 总结与展望
由于海上环境复杂以及海浪的影响,舰体会发生横摇、纵摇、升沉等现象,激光测距机在坐标系中应保持惯性稳定,因此在进行距离交汇解算时,应对舰体的横摇、纵摇和升沉等信息进行补偿,保证激光测距机在坐标系中测距数据的正确性。
激光测距机距离交汇定位方法虽然存在较多误差源,但是这种方法不能被传统方法所取代。传统的一些方法虽然精度较高,但是适用环境能力差,对舰船状态要求高,在很多情况下不能正常进行;而距离交汇定位条件要求低,适用范围广,在准静态环境下测距定位优势明显。
通过对距离交汇定位方法的误差进行分析,提出一种新的激光测距定位技术实现方法——距离差法,称之为伪干涉机制。所谓伪干涉机制定位就是一个激光测距机为主站发射激光,其他站作为副站接收,然后利用距离差求解目标位置。下面对两种方法进行简单的比较。
1)距离交汇法测距是几个激光器同时发射激光脉冲,并分别接收,这样就存在发射时间不同步的问题,需要采用外同步触收测距,建立时统;而距离差法测距是一个激光器发射脉冲,其余3个接收脉冲,不存在时间不同步的现象。
2)距离交汇法由于同时发射激光,在接收时要分别接收各自发射的激光,可能存在接收错误的情况,需要采用编码测距方式,每台测距机使用不同的频率进行测距;而距离差法则不存在这方面的问题。
3)距离差法是将距离和相减,用差值进行计算,会在很大程度上抵消激光在空气中传播时产生的随机误差。
在以上3方面距离差法测距定位比距离交汇法有一定优势,但是也具有一定的弊端,比如,机上合作目标对激光的散射要覆盖全部的激光测距机,否则副站接收不到回波,因此,距离差法要解决接收视场匹配的问题。总之,伪干涉机制定位具有良好的应用前景,下一步将对其进行深入研究。