基于图像欧式距离和拉普拉斯特征映射的端元提取算法(通讯)
杨 磊, 刘尚争
(南阳理工学院电子与电气工程学院,河南南阳473004)
摘要:由于多重反射和散射,高光谱图像中的混合像元实际上是非线性光谱混合。传统的端元提取算法是以线性光谱混合模型为基础,因此提取精度不高。针对高光谱图像的非线性结构,提出了基于图像欧氏距离非线性降维的高光谱遥感图像端元提取方法。该方法结合高光谱数据的物理特性,将图像欧氏距离引入拉普拉斯特征映射进行非线性降维以更好地去除高光谱数据集中冗余的空间信息和光谱维度信息,然后对降维后的数据利用寻找最大单形体
体积的方法提取端元。真实高光谱数据实验表明,提出的方法对高光谱图像端元提取具有良好的效果,性能优于线性降维的主成份分析算法和原始的拉普拉斯特征映射算法。
关键词:图像处理;高光谱图像;端元提取;非线性降维;图像欧氏距离;拉普拉斯特征映射 中图分类号:TP751 文章编号:1671 -637X(2016)04 -0048 -05
0 引言
由于高光谱成像光谱仪空间分辨率的限制以及自然界地物的复杂多样性,获得的遥感图像的某些像素中往往包含多种地物类型,即混合像元¨J。如何有效地实现混合像元分解,已经成为遥感研究的一个重要方向。混合像元分解可以分为端元提取和丰度估计两个步骤。端元提取是混合像元分解的前提,已有的端元提取算法有:基于凸面几何学的像元纯度索引,顶点成份分析,N-FINDR;可以同时完成端元提取和丰度估计的迭代误差分析,最小体积变换,非负矩阵分解等算法。这些算法均以线性光谱混合模型为基础,但是由于地面散射的非线性、最小反射率波长明显的非线性变化、像素内水体变化的衰减作用、一个像素内的多种散射和亚像元成分的异质性等因素,高光谱数据具有内在的非线性特征。
处理高光谱图像非线性的一个策略是进行非线性降维,流形学习算法可在降维的同时更好地挖掘数据的非线性特性,已经被成功应用于高光谱图像的非线性特征提取、分类、异常检测、混合像元解混等方面。将经典流形学习算法等距映射(Iso-metric Mapping,Isomap)引入高光谱图像处理,代替主成分分析( Principal Component Analysis,PCA)对高光谱数据进行非线性降维,获得较好的分类效果。提出利用光谱夹角距离( Spectral Angle Distance,SAD)和光谱信息散度(Spectral Information Divergence,SID)代替欧氏距离与测地线距离相结合对高光谱图像进行特征提取,获得较好效果。参考Isomap算法提出了基于测地线距离的最大单形体体积解混算法,虽然该算法考虑了高光谱数据的非线性,得到了较好的解混结果,但仅考虑了高光谱图像的光谱特征,忽略了其空间信息。本文针对高光谱图像的非线性特征,结合高光谱图像的空间信息,采用基于图像欧氏距离的流形学习算法,对高光谱图像进行非线性降维,并参考N-FINDR算法对降维后的数据进行端元提取。提出的算法充分考虑了高光谱图像的非线性结构和图像的空间信息,提高了端元提取的精度。
1 拉普拉斯特征映射算法
拉普拉斯特征映射( Laplacian Eigenmaps,LE)算法是2001年BELKIN等人基于图谱理论提出的,是一种局部流形学习算法,其基本思想是在高维空间中邻近的点映射到低维空间上时仍是邻近的。
LE算法的实现如下所述。
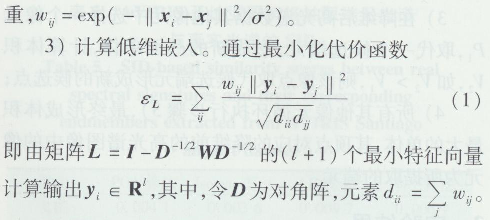
LE算法的基本思想较简单,即保留流形的局部近邻信息,有利于数据的聚类与分类;因其考虑局部近邻信息,求解过程为稀疏矩阵的特征值问题,因此计算较简单。
2基于图像欧氏距离流形降维的端元提取算法
2.1 图像欧氏距离矩阵
原始的LE算法采用的是欧氏距离寻找与每个点最近的k个近邻,被广泛地应用于人脸、手写字体等高维数据的特征提取和识别。但是对于高光谱图像数据,地物在图像中的分布具有连续性,每种端元的光谱与其周围的背景像元紧密相关。根据图像的空间特性,2005年WANG等人提出了图像欧氏距离,它的核心思想是将空间关系引入图像块距离计算中,对其改进后将其应用于高光谱图像块之间的距离计算。对于水平宽度、垂直宽度和波段数分别为W,

![]()
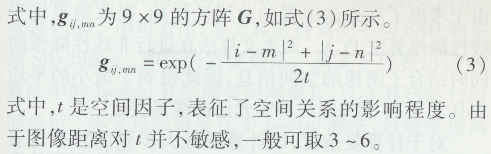
式中,t是空间因子,表征了空间关系的影响程度。由于图像距离对t并不敏感,一般可取3~6。
从式(2)和式(3)可看出,图像欧氏距离很好地给出了高光谱图像中以观测像素为中心的八邻域之间的距离关系。在实际应用中,当地物分布较为集中或呈大片分布时,图像块中的像素之间的空间关系较为显著,因此空间因子£取较小值;反之,需选择较大的t。
2.2基于图像欧氏距离流形降维的端元提取算法
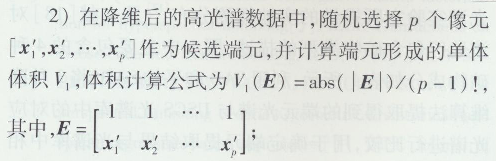
本文算法利用图像欧氏距离代替LE算法中的欧氏距离对高光谱数据进行非线性降维,并参考N-FINDR端元提取算法,对非线性降维后的数据随机选择p
 当前选择的光谱端元,如果某个替换能得到更大体积的单形体,则这次替换作为有效替换得以保留,否则作为无效替换而被淘汰,最终得到p个端元。
当前选择的光谱端元,如果某个替换能得到更大体积的单形体,则这次替换作为有效替换得以保留,否则作为无效替换而被淘汰,最终得到p个端元。
算法具体步骤为:
1)指定端元数目p,用2.1节所述的图像欧氏距离代替LE算法中的欧氏距离对数据进行降维,使其维数降至p-1维;
3)在降维后高光谱数据其他像元中选择一个像元P1,取代一个候选端元,形成新的凸面单体,计算体积V2,如V2>V1则该像点取代候选端元形成新的候选点;
4)所有其他像元循环执行步骤3),最终形成体积最大的单体,其顶点对应的降维前的高光谱图像中的像元为所提取的端元。
3实验结果
本节中采用实际的高光谱数据测试算法的性能,将本文提出的算法与PCA,Isomap,LE 3种降维算法进行比较。降维后的数据,结合N-FINDR端元提取算法,通过端元提取精度来评价这四种算法的性能。本文采用SAD和平均SAD,SID,平均SID作为端元提取结果的评价标准,这些参数越小,说明端元的估计值与真实值越相似。所有的算法均运行10次,取其均值。本文中涉及到的所有算法均利用Matlab 2010a,在同一台计算机上实现(Win7系统,Intel Pentium处理器3.0 GHz,4 GB内存)。
3.1 AVIRIS Cuprite数据
AVRIS Cuprite数据为1995年7月获取的美国Ne-vada州Cuprite采矿区的数据,该高光谱图像数据大小为250 x191,224个波段(0.4~2.5ym),空间分辨率和光谱分辨率分别为20 m和10 nm。本实验从中截取50 x50像素大小的子图。除去存在水气吸收和信噪比较低的波段,实验中使用了188个波段。实验数据的图像(波段35)如图1所示。
在虚警概率PF= 10-6或者更小时,用虚拟维度方法求出端元个数为4。与实地勘测地物分布图相比较,图1中主要包含的4种矿物成分分别为钙铁榴石、蓝线石、白云母、榍石。对比美国地质勘探局( USGS)光谱实验室所提供的实地探测分布及对该地区包含矿物类型的描述,图1中主要包含的4种矿物成分如表1所示,利用SAD和平均SAD,将3种降维算法提取得到的端元光谱与USGS光谱库中的对应光谱进行比较,用于确定端元提取结果与光谱库中相应地物光谱的近似程度。
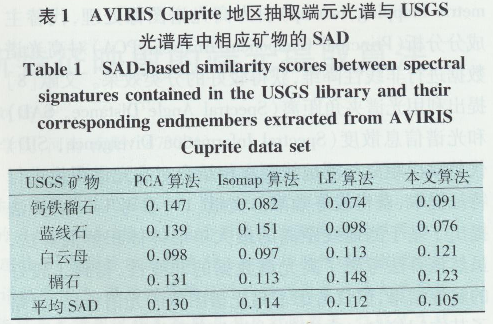
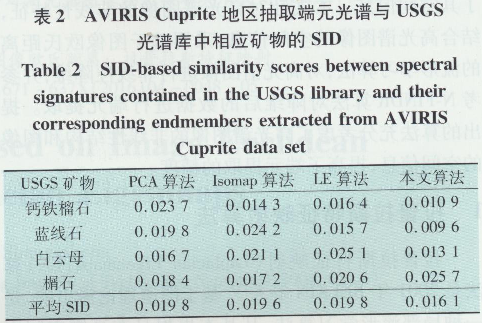
本文算法在端元个数确定后,还包括空间因子t和LE的邻域K两个参数,其中t为空间因子,根据2.1节所述,当地物分布较为集中或呈大片分布时,t取较大值,AVRIS Cuprite数据地物分布较为分散,因此取t为3。本文对k取[3 30]值进行实验发现,k<10时结果不稳定,但当k取[10 30]时,结果差别不大,因此取k为15。表1、表2分别为4种算法提取的端元结果与USGS光谱库中对应光谱的SAD和SID。从表1和表2中看出,Isomap算法、LE算法和本文提出算法由于考虑了高光谱图像的非线性结构,提取结果优于线性降维算法PCA。而本文算法在进行非线性降维的同时结合了图像的空间信息,因此得到了最小的平均SAD和平均SID,即与真实光谱曲线最接近。
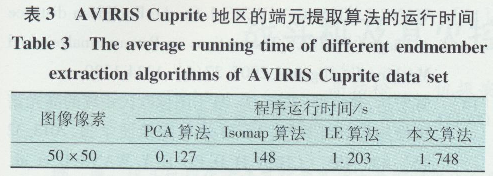
对于计算复杂度,以计算量最大步骤的复杂度表示:设L为原始高光谱数据维数,N为数据点个数。Iscmap算法需要对N x N的拉普拉斯矩阵进行特征分解,计算复杂度为0( N3);LE算法的拉普拉斯矩阵是稀疏阵,计算量最大的步骤是搜索k个最近邻点,计算复杂度为0(LN);PCA算法的计算复杂度取决于对Lx L的协方差矩阵和类内离差阵的特征值分解,为0(L)。从表3可看出,PCA算法所需时间最少,LE算法次之,本文算法在LE算法的基础上,将欧式距离改为较为复杂的图像欧氏距离,因此所需时间多于LE算法,而Isomap算法最复杂,因此所需时间远多于LE算法和本文算法。
3.2 AVIRIS圣地亚哥机场数据
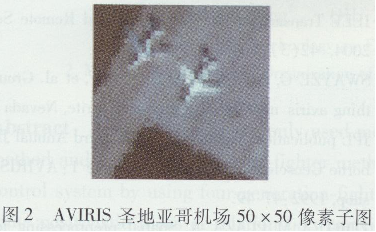
美国圣地亚哥机场AVIRIS数据的图像光谱范围为0. 389~2.467 ![]() ,共224个波段。去除水吸收谱段,剩下1 88个谱段被用于进一步处理。为了减少计算的时间复杂度,从原始图像左下角截取大小为50×50的子图,如图2所示。从图2中看出,包含硬土、飞机、混凝土1、混凝土2这4种端元。为了定量评价算法的性能,各端元的参考光谱为根据地物真实分布情况人工从图像中提取得到。在每一类像元的中心处分别抽取4个点,并将其均值作为该端元的参考光谱。
,共224个波段。去除水吸收谱段,剩下1 88个谱段被用于进一步处理。为了减少计算的时间复杂度,从原始图像左下角截取大小为50×50的子图,如图2所示。从图2中看出,包含硬土、飞机、混凝土1、混凝土2这4种端元。为了定量评价算法的性能,各端元的参考光谱为根据地物真实分布情况人工从图像中提取得到。在每一类像元的中心处分别抽取4个点,并将其均值作为该端元的参考光谱。
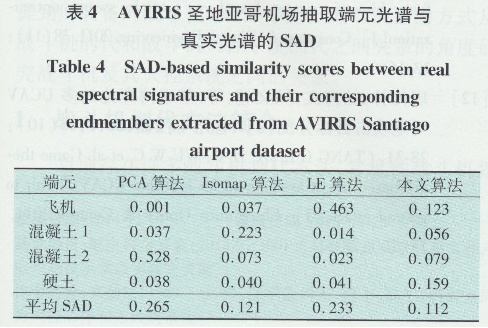
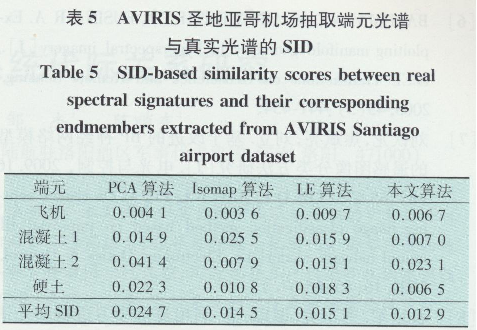
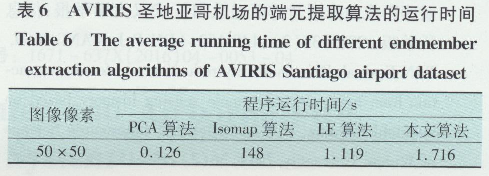
该实验数据地物分布比较集中,根据2.1节所述空间因子选取£为3,对k取[3 30]的值进行实验发现k<10时结果不稳定,但当k取[10 30]时,结果差别不大,因此取k为15。比较4种算法得到的端元估计光谱与真实光谱之间的SAD,SID如表4、表5所示。从表4、表5中可看出,本文算法得到的平均SAD和平均SID均最小,即算法精度最高。从表6可看出,4种算法中的Isomap算法需要时间最长,PCA算法运行时间最短。本文算法精度优于Isomap算法,且效率远高于Isomap算法。
4 结语
针对高光谱数据的非线性特征,提出了基于图像欧氏距离非线性降维的高光谱遥感图像端元提取方法。该方法结合高光谱数据的物理特性,将图像欧氏距离引入拉普拉斯特征映射非线性降维算法中以便更好地去除高光谱数据集中冗余的空间信息和光谱维度信息。真实高光谱数据实验表明,提出的方法对高光谱图像端元提取具有良好的效果,性能优于线性降维
PCA算法、Isomap算法和原始的LE算法,并且算法效率高于非线性降维的Isomap算法。