北斗动动相对定位精度测试方法研究(通讯 )
汪捷, 徐冠楠
(海军工程大学导航工程系,武汉430033)
摘要:着重研究了适合于北斗动态对动态定位的精度测试方法,包括基线长度约束检测法、动态瞬时精度检测法、借助GrafNav软件比较法,以及实时与事后比较法等,并通过实例数据进行了分析和验证、,结果表明,精度检测方法可靠有效,能够满足动动定位的精度检测需求。
关键词:北斗系统;精度测试;动态瞬时;GrafNav
中图分类号:P228.4 文章编号:1671 - 637X( 2016) 04 - 0066 - 04
0 引言
传统GNSS差分定位的前提是基准站相对地面处于静止状态,因此可以利用基准站的精确位置作为求解相对位置的约束参数。但在航空器对接和飞机着舰等一些应用中,需要求解的是两个运动载体之间的相对位置矢量,这类技术可以统称为动动相对定位¨。
在动动相对定位研究中,如何测试评估某定位系统或算法的定位效果,往往从精度、可用性、连续性和完好性等方面人手,而精度则是最能直接说明系统或算法定位效果的因子,精度测试是判断和测试模型方法精度以及性能的关键环节。动动定位中由于基线位置的不断变化,一般很难找到用于精度检测的基准.且实时野外测试很难复现,所以对动动定位进行精度检测具有较大难度,传统的静态对静态定位或者动态对静态定位的精度测试方法中,如静态基线长度已知条件下的检测法、实时定位结果与事后结果比较法等,相对动动定位应用而言,这些方法往往不能全面反映各自算法模型的效果。
从严格意义上讲定位精度( Position Accuracy)包含准确度( Accuracy)和精确度(Precision)两方面指标。其中:准确度是指测量值与真实值的符合程度,用于对解算或者测量值验证是否正确的因子;精确度是指多次测量的测量结果彼此之间的符合程度,用于表明测量值的可重复性。从导航定位层面研究而言,定位精度更多的是指导航设备测量位置与待测点真实位置的一致程度,也就是定位准确度。常用的精度统计方法有RMS均方根法、圆概率误差法(CEP)和球概率误差法( SEP)等,其中,RMS均方根较为常用,是指65 010置信概率统计的误差结果。需要说明的是,为更全面准确地对定位方法进行测定,在本文中,定位精度的计算是以所有结果的95%置信概率统计为主要衡量指标。
1静态检测法
静态检测法是定位精度检测中最易实现,也是最常见的方法,一直广泛应用于单点定位、常规RTK、网络RTK等定位技术的精度检测。主要方法是:在已知的区域内选取两个检测点,进行长时间的同步静态观测,对长时间采集的数据进行处理,得到的两点之间的相对基线向量即可作为检验标准。测试过程中,将基准站和流动站接收机分别架于两个不同的检测点,进行静态单点定位,采集并保存数据。在事后数据处理过程中,结合已有的基线向量基准,对实时定位结果进行分析统计,可以测得静态条件下的定位精度。
在静态精度检测方法中,其显著优点在于检测的结果可以较为准确地反映定位的精度,但不足之处在于检测动动定位系统时,不能完全反映定位精度和测试模型算法。其原因有以下两点:首先,静态检测方法通常是采用静态测量方式,在这种条件下测试的结果比较理想,难以真实反映实际动动相对定位应用中的精度测试;其次,静态检测需要不变的已知准确坐标的点或者相对基线标准,而在某些测量复杂区域较难实现。
2动态检测方法
在对传统精度检测法分析的基础上,着重考虑实际动动相对定位的特点、应用条件等因素,提出以下几种不同类型的动动精度测试方法。
1)基线长度约束检测法。
首先是在已知两点之间基线的动动相对定位情况下,诸如固定于汽车等载体之间的接收机,这种方法一方面用于研究载体的三维姿态变化以及分量矢量的变化,另一方面应用于对相对基线解算方法可靠性和可用性的验证。其操作方法是,将基站和流动站的接收机天线固定于某一个运动载体上,进行长时间的实时动态定位,并采集数据。在事后处理过程中,不利用已知基线长度的信息,而是利用某些算法对采集数据进行解算得出其基线长度结果,将此结果和已知的基线长度做比较,两者的差值反映了某些算法的精度和可靠性。
2)实时与事后处理结果比较。
一般而言,GNSS数据的事后处理效果要明显优于实时处理。因此,如果为了研究实时性定位解算效果,在采集的数据足够多的情况下,一般将事后数据处理的定位结果作为标准值,把实时解算的结果与事后数据处理的结果进行比较,根据差值结果的置信度等反映系统实时定位精度。
3)动态瞬时检测。
为考察在动动定位中某些瞬时历元定位结果的实时性以及和事后解算结果的符合程度,就必须对某些历元定位精度进行瞬时检测。这要求必须设立某些固定点,将其对应的历元实时解算结果与事后对应历元结果做比较。具体方法是,进行精度检测时,在设定好的运动路线的特殊点(如转折点,中点等)上设置多对相对位置精确已知的检测点,将基准站和流动站接收机各自同时运动到上述的某对检测点上,记录下此时解算的北斗时刻数,事后对该历元下的解算结果进行比较。与纯静态和准动态测试相比,该方法能够反映接收机的运动状态,不足点在于只能够对某些时刻的运动状态进行检测,无法连续地反映系统定位精度。
4) GPS软件解算结果比较。
GPS定位技术目前已经非常成熟,系统定位精度可达厘米甚至毫米级,对于短基线的动动相对定位来说,北斗系统与GPS系统差异导致的基线解算偏差并不是很大,以GPS基线处理结果作为标准值验证北斗相对定位精度有一定的参考作用。目前有诸多适合于静态、动态GPS数据解算的商用软件,如GrafNav软件等。GrafNav是Novatel公司的GNSS事后处理软件,该软件采用了完善的滤波算法,功能强大、稳定,利用双频GPS在5 km内的动态测量精度可达到1cm +1ppm(GrafNav Web)。利用这些软件解算的GPS结果可以作为检测BDS定位精度的辅助参考标准。
3实例分析
在对精度检测方法做大致介绍后,结合部分试验数据进行实例说明。
3.1静态检测法
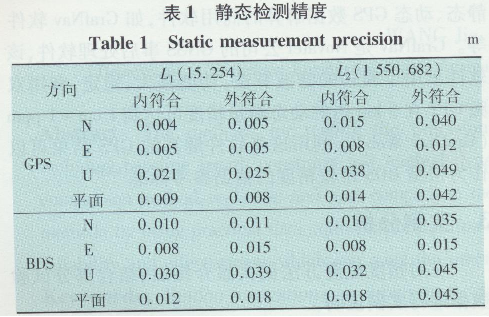
为验证上述静态检测法效果,现进行静态相对定位试验验证。由于实际应用中相对定位的基线不会很长,现选择两对相对坐标精确已知的检测点,其中一条为超短基线L1,经测量长度为15.254 m,另一条基线L2长度稍长,为1550. 682 m。检测过程中,每条基线的同步观测时间都为1h左右,采样时间为1 s。实时解算软件根据采集的数据独立解算出每个历元GPS和BDS的基线结果,分别统计相应解的内、外符合精度。
表1为两条基线的静态检测结果,即两条测试基线在以基准站为中心的东北天坐标系下的N,E,U和平面方向上的内外符合精度。其中,N,E,U方向偏差为以基准站为中心东、北、天坐标系下的直角坐标。
由表1可以看出,BDS实时基线解算结果在N,E,U3方向和平面方向的外符合精度都优于4 cm,其中,第一条基线GPS的解算结果略优于BDS,第二条基线BDS和GPS的解算结果精度相当,并且无论是BDS系统还是GPS系统,解算结果在平面方向的精度都比高程方向要高。
3.2动态检测法
上述动态检测法1)和3)均为与标准结果对比,上述静态检测中已做分析,因此下面主要对两法做试验测试。
1)基线长度已知条件的精度检测。
试验开始前,将基准站和流动站的天线分别固定于一根钢管两端螺纹接口处,将其置于各自的试验小车上,在测量区域推动小车运动约10 min,数据采样率为1s,同步采集并保存两站数据。利用实时解算软件分别解算出各个历元时刻的BDS和GPS的基线结果,事后分别统计BDS和GPS实时解算的内、外符合精度。事后数据处理前,精确测得固定基线长度值为0. 910 m。精度检测时,设定基线长1m为上限。表2列出BDS和GPS实时解算的基线长度精度指标,图1所示为BDS和GPS每个历元解算基线长度与真值的偏差示意。
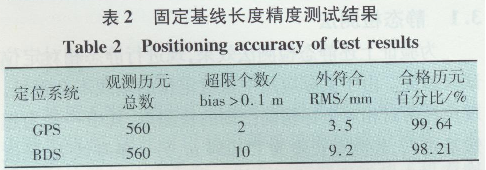
由表2可知,在试验结果测试中,BDS解算得到的基线长的外符合精度都在1cm以内,与GPS相比而言,BDS数据基线长的解算精度和数据有效成功率略低。
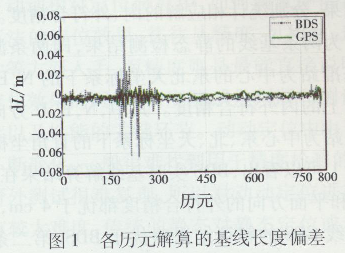
由图1可知,GPS解算的结果偏差在零值上下波动,波动幅度比较小,而BDS波动程度大于GPS,在第200个历元附近,BDS系统解算的相对基线误差最大,为0.07 m,而此时GPS在0.01m上下波动,随着历元数增多,BDS和GPS最终解算的基线偏差收敛于0.01 m附近。经分析,在第200历元左右处有树木遮挡,由于BDS可视卫星数目较多,变化较快,导致在该处BDS数据偏差较GPS更大,在图中表现为第100到200历元之间的BDS和GPS基线偏差均大于其他历元,并且BDS变化幅度更为剧烈。
2)动态瞬间检测。
选择上述静态检测中的超短基线为检验标准,如图2所示,BD为待检测基线,C为基线中点。试验开始后,一人手持装有天线的装置按照路线A![]() B
B![]() C运动,另外一人持天线装置按照路线E
C运动,另外一人持天线装置按照路线E![]() D
D![]() C运动,当第一人前进到B点时候,确保第二人也行进到D点,由第三人根据解算软件记录下此刻对应的北斗周秒,作为一次检测。在中点C处相遇后,再沿着各自路线返回,同样两人分别达到B点和D点时记录下此刻对应的北斗周秒进行一次检测,如此往返5个来回,共检测10次。
C运动,当第一人前进到B点时候,确保第二人也行进到D点,由第三人根据解算软件记录下此刻对应的北斗周秒,作为一次检测。在中点C处相遇后,再沿着各自路线返回,同样两人分别达到B点和D点时记录下此刻对应的北斗周秒进行一次检测,如此往返5个来回,共检测10次。
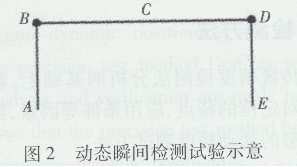
事后数据处理时,根据试验过程中记录的北斗周秒查找对应的历元,并将天线高程转换为地面测站点之间的相对基线结果,与BD基线真值做比较。表3为动态瞬间比较结果,其历元时刻是从195 250开始,到195 500结束。
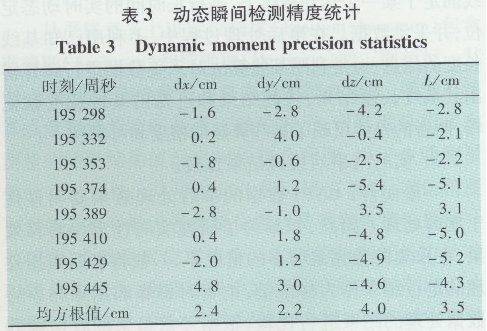
表3对10个历元动态条件下的基线解算偏差进行了一定的统一。其中,d x,d y,d z表示利用软件实时解算的基线分量与基线参考真值的偏差,L表示基线长度偏差。由统计结果可以看出,在测试的10个历元中,d x,d y,d z和L偏差量都在厘米级水平,基线长度最大偏差量为5.4 cm。
4 总结
为测试动动相对定位条件下的系统或者算法定位精度的问题,本文在传统相对定位精度检测方法分析的基础上,着重从基线长度、实时性等条件人手,研究了动动定位条件下的精度检测方法。为验证各种方法的可靠性和有效性,分别提出试验方案并进行试验测试,结合试验结果分析可得,提出的基线长度已知情况下的事后精度测试法、动态瞬间历元检测法都能够可靠有效地反映系统定位的精度以及性能指标等。为此,在实际动动定位精度测试过程中,往往需要综合考虑动静态情况,是否基线已知,所用系统等多种条件,并合理选择上述精度测试方法。