叶 涛 王 鉴
(中北大学信息与通信工程学院,山西太原030051)
摘要:针对无人机光电吊舱小型化、轻量化的发展趋势,充分利用了FPGA的硬件资源,设计了一种基于FPGA的光电吊舱控制系统。该系统在减小控制板工装尺寸的同时,提高了系统的稳定性,可取代传统的FPGA和DSP联合设计的光电吊舱控制系统。详细描述了FPGA控制系统硬件组成,提出了多环路控制回路设计,并实现增量式PI控制算法。最后,通过摇摆台试验测试验证该系统的稳定精度。
关键词:FPGA光电吊舱无人机控制系统自动识别图像跟踪多环路控制回路VHDL增量式PI
中图分类号:TH -3;TP273 DOI:10. 16086/j.cnki.issn 1000 - 0380. 201606012
0 引言
光电吊舱系统是一个复杂的光机电系统,其主要作用是隔离载体的扰动、保持视轴稳定,同时实现对侦察目标的自动识别与跟踪。光电吊舱的有效载荷根据执行任务的不同而采用不同的组合搭配。对于无人机光电吊舱而言,一般搭载的光电任务载荷包括数码相机、可见光摄像机、红外热像仪、激光测距仪等。
本文研究的无人机光电吊舱系统采用两框架两轴的机械结构。光电吊舱控制系统采用FPGA作为平台处理芯片,充分利用FPGA的硬件资源和现有的IP核,在实现控制系统板小型化的同时,确保控制系统在稳定平台上达到较高的稳定精度和稳定性。
1 系统构成与工作原理
光电吊舱控制系统原理框图如图1所示。系统主要由FPGA、MEMS陀螺、角度传感器、电流传感器、驱动电路、力矩电机、测控和飞控计算机等组成。

根据系统的任务,各个模块主要完成以下功能。
(1) FPGA主控单元。FPGA主要功能包括:①根据系统的通信协议,完成各个模块数据的采集;②负责各个模块数据交换的同步控制,确保数据交换的可靠性;③根据采集的角度信息,模拟无刷电机霍尔信号控制电机转向;④完成电流回路、陀螺稳定回路、位置回路、图像跟踪回路的PI控制计算,以及电机控制量PWM的输出;⑤预留资源实现图像跟踪器设计,计算图像的脱靶量。
由于系统需要完成大量的浮点运算和其他的逻辑控制,对FPGA的资源性能要求比较高。因此,本系统选用altera公司stratixⅣ系列的EP4SE530芯片。该芯片除了拥有53万逻辑门外,还拥有高达600 MHz可配置为9 x9位、12×12位、18×18位、36×36位全精度乘法器的高速DSP模块,满足任务要求。同时,该芯片还为后续的图像融合功能预留有足够的资源。
(2) MEMS陀螺模块。MEMS陀螺作为角速率敏感元件,安装在俯仰框架的稳定平台上,敏感载体及其他干扰因素使载荷产生相对惯性空间的扰动角速率。本系统选用数字量输出、RS - 422接口的MEMS陀螺。FPGA可以模拟RS - 422接口协议,完成对MEMS陀螺的数据采集。
(3)角度传感器模块。角度传感器数据采集包括三个部分:①利用FPGA的IP核中的NCO模块产生正弦波数字量,送给D/A转换器,经过放大器后生成旋转变压器激磁信号;②FPGA生成RDC控制时序,输出控制信号,完成对RDC的数据采集;③根据采集的旋变角度模拟电机的霍尔信号。
(4)电机驱动电路。驱动电路可以分为三个部分:①生成换向表,驱动电路中的CPLD根据霍尔信号生成三相直流无刷电机换向表;②光电隔离,将强电信号和弱点信号隔离,以防止强电信号对弱点信号产生干扰;③功率放大电路,将PWM控制信号转换成可直接驱动框架直流无刷力矩电机的信号。无刷电机驱动电路控制方案如图2所示。图2中:EN表示电机使能信号,控制俯仰和方位电机的工作状态。

(5)力矩电机。在稳定平台的设计当中,首先要对电机的力矩需求进行估算,用来指导电机选型。平台各轴上的力矩电机除了抑制轴承引起的摩擦力矩、质量偏心静不平衡力矩等于扰力矩外,还需为系统提供最大的角加速度指标。通过建立模型,估算出俯仰轴的力矩要求为0.45 N. m,方位轴的力矩要求为0.6 N.m,因此系统选用的直流无刷力矩电机的堵转力矩为1.2 N. m。
2多环路控制回路设计
多控制回路的设计是为了使光电稳定系统有足够的稳定裕度和抗干扰能力。其控制回路包括目标跟踪回路、姿态锁定回路、陀螺稳定回路和电流回路。平台的控制信号Ctrl控制着光电吊舱的工作状态。当Ctrl为1时,光电吊舱工作于目标跟踪状态;当Ctrl为0时,光电吊舱工作于姿态锁定状态。多环路控制回路的原理图如图3所示。


控制回路是图像跟踪回路还是姿态锁定回路。各个回路的作用如下。①电流回路:由电流传感器形成负反馈,以减小电流电压波动的影响,提高控制力矩的线性度,实现对电流的平稳控制,使之不发生突变。②陀螺稳定回路:陀螺稳定回路用于抑制旋转轴上的干扰角速率,确保平台光电载荷的光轴在惯性空间保持稳定。③目标跟踪回路:目标跟踪回路是在陀螺稳定回路的基础上引入的,利用图像跟踪算法始终锁定光电载荷视场中的目标,并将目标脱靶量送给伺服控制器,执行跟踪回路控制计算;将计算结果带入陀螺稳定回路,驱动电机带动光电载荷旋转;执行目标跟踪运动,使目标始终保持在光电载荷视场中心。④姿态锁定回路:姿态锁定回路根据稳定平台输入的控制指令调整平台的姿态角,将平台两框架轴锁定到特定的角度,以实现平台框架角度置零或进入保护状态的功能。
3 FPGA控制算法实现
3.1 PI控制算法
由于机载光电吊舱的特殊工作环境,受风阻力、飞机姿态的变化、机载振动等影响,许多参数都是时变的,因此选用PI控制策略。PI控制调节既具有比例调节作用反应快、无滞后的优点,又具有积分调节的优点,可以消除静差。对于调节对象而言,选择合适的比例带和积分时间,基本可以满足系统要求。
多闭环回路的PI控制主要包括位置环、速度环、电流环控制。位置环回路通过通信模块,从上位机获得参考位置信息,与RDC反馈的实际位置信息作差得到误差量;误差量作为位置环路PI输入,位置环路PI输出为速度环参考输入。速度控制器从位置控制器获得无刷电机速度参考信号,与MEMS陀螺反馈的实际速度信号同时输入速度控制器,其输出为电流环输入。电流控制器从速度控制器获得无刷直流电机电流参考信号,与反馈的实际无刷直流电机三相电流信号同时输入电流控制器,速度控制器通过PI运算控制,输出PWM信号。其中PI控制结构说明如下。

在实际应用中,为了缩短开发周期、提高系统可靠性,大多采用数字式PI控制器。将连续的PI控制算法进行离散化处理后,得到位置式PI控制算法。

对比增量式和位置式PI算法的数学模型可知:位置式PI算法的输出量μ(k)是对过去所有状态偏差量的累加;增量式PI算法只与当前状态和前一时刻的状态偏差有关,避免了误差累加。而在多环路PI控制算法中,需要对位置、速率、电流等信号进行采样,每次采样都会带来系统误差和外界干扰引起的误差。因此,在光电吊舱的控制器中,增量式PI控制算法更适用。
3.2增量式PI控制器的VHDL实现
在算法实现的早期阶段,必须仔细考虑更适合算法实现的相关数据是定点数还是浮点数。就FPGA系统而言,采用定点数意味着更高的速率和更低的资源消耗;采用浮点数则具有更好的动态范围且不需要转化,这为实现较为复杂的算法提供了便利。
综合考虑系统资源、速率和精度等要求,本系统算法中数据的表达.选择定点数。定点数由整数和小数部分组成,由于小数部分被固定在某处,因此被称作定点数。

在未指明小数点的位置时,一般规定在最低位的右边,这时的定点数就变成了整数。
定点数增量式PI控制器的VHDL实现可以划分为如下步骤:①误差量求取;②有符号定点数乘积;③位权对阶相加处理;④有效位的截取。考虑到系统对数据精度,要求先将增量式PI算法的控制系数转化成24位定点数,然后经过相应的乘法加法器得出PI算法的比例和积分项,最后通过48位加法器完成一次PI算法的计算。考虑到FPGA的资源和处理性能,须删除数据冗余,即进行对阶和截位处理。
增量式PI算法时序仿真结果稳定,无跳数等情况。
4试验结果
4.1 稳定精度测试方法
在试验的摇摆台上安装好待测试的巡检光电吊舱,使两者的方位轴重合。在距离光电吊舱3m处放置一块白色靶板,在靶板的中心处标记一个黑色靶标。在图像跟踪状态时,可见光摄像机处于最小视场角,靶标位于视场中心;当图像的脱靶量输出为零时,断开图像跟踪回路,此时脱靶量正常输出。开始启动摇摆台,摇摆台的方位轴和俯仰轴均以幅值为50、频率为0.4 Hz进行摇摆。脱靶量数据输出频率为25 Hz。记录50个摇摆周期。稳定精度的计算公式如下:
直方向脱靶量的最小值和最大值;C为角度和弧度之间转换系数。对50个摇摆周期求取均值,可以得到控制系统的稳定精度。
4.2试验结果
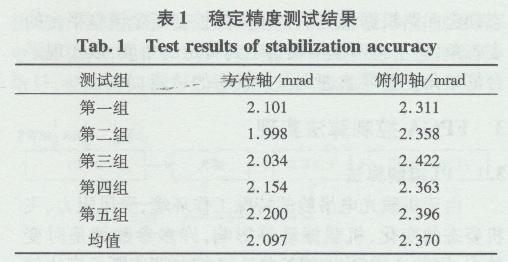
图4分别为方位和俯仰的稳定精度曲线图。


以5组摇摆试验测试稳定精度,结果如表1所示。对连续5组摇摆试验,每次50个摇摆周期的稳定精度和稳定性能进行测验。结果表明,方位轴和俯仰轴的稳定精度控制优于2.5 mrad,可实现视频图像的稳定输出。
5结束语
针对无人机光电吊舱的小型化、轻量化的趋势,研制了采用单FPGA作为控制核的无人机光电稳定吊舱控制系统。分析了光电吊舱的组成及各个组成模块的工作原理,描述了多控制回路实现过程及各个回路在控制系统中的作用,同时解释了增量式PI控制算法及VHDL的实现过程。最后,通过摇摆台的试验室测试,验证了控制系统的稳定精度。
下一篇:返回列表