廖伟强1,罗智芸2,徐素梅2
(1.中山职业技术学院,广东 中山 528400;2.中山市中等专业学校,广东 中山 528400)
摘要:障碍检测避让是水下清污机器人运动控制的关键问题。分析了机器人障碍的特点和检测方法,确定了障碍控制的方案,设计了检测电路和控制程序,实现了机器人的障碍避让和控制。
关键词:水下清污;障碍检测;水下机器人;避障控制 中图分类号:TP242.6
0引言
水下清污机器人是一种在水下行走并进行清污的机器人。以往的水下清污机器人大多以人力拖动或操作人员在岸上通过观测机器人的运动情况实时操控。该方式效率不高而且需增加人工成本,已不能满足新时代下对智能设备的要求。
机器人在水下运动过程中有可能遇到立柱、墙壁、树干等障碍物,要实现机器人自动作业或者对机器人进行远程操拭则必须保证机器人在水下正常行走时不出现碰撞、堵死或卡死等情况,因此障碍的检测与避让是必须面对和必须解决的问题。
1 障碍检测
运动物体的障碍检测主要有接触检测和非接触检测两大类,接触检测主要有微动开关检测、压力传感器检测和加速度检测;非接触式检测主要有红外检测、循迹检测、超声波检测和接近开关检测等几种。
接触式检测的3种方式均需要使机器人直接接触到障碍物,并利用与障碍物接触过程中产生的相互作用力,将其转换成电信号进行障碍检测。为了不增加机器人的整体尺寸,一般将检测装置直接安装在机器人主体并浸泡于水中。这类测试方法往往需要机器人进行紧急制动,会产生较大的惯性甚至碰撞,会对机器人整体机构的稳定性及其使用寿命造成影响。
采用非接触式的检测方法时,传感器均不需要与障碍物进行直接的接触,但从安装的角度来说其均不太适合安装于水下。如果一定要安装于水下,则成本会较高,且检测精度会下降,因此可以考虑将其安装于水面与机器人同步运行。在这几种方式中又以超声波检测效果最好。因为红外检测会受到光照的影响,循迹检测需要在水下布设循迹识别物,接近开关检测则需要与障碍物非常接近,均有各种不足。而超声检测,则不需要考虑这些因素,且可以较准确地测量出障碍物与机器人的距离,根据需要控制指令任意设定避障方案。
2控制电路
在使用超声波进行障碍测量时,采用HC-SR04超声检测模块,其模块电路如图1所示。使用51系列单片机作为主控电路,经MAX232芯片进行信号调制后输送到超声波发生头使其产生超声信号,通过一个PNP的三极管控制超声信号的电源通断,然后通过一款74系列的芯片对接收信号调制处理后输送给单片机进行信号的读取和运算,并将计算结果反馈给J1端口,用于与外部设备进行通讯。模块的实物如图2所示。


该模块采用IO触发方式进行控制,通过单片机的JO口将TRIG引脚拉低,然后由单片机给出一个10 μs以上的脉冲信号,模块便发送8个40 kHz的超声方波信号,并自动检测是否有信号返回。当有信号返回时,通过IO输出一高电平,高电平持续的时间就是超声波从发射到返回的时间。其测试的距离为:

其中:s为测试距离,m; v为声音的速度,m/s; t为高电平时间,s。
实际使用中可以根据测量到的障碍距离和机器人的运行速度来决定机器人何时进行减速和停止运行,或者拐弯避让。
3应用程序设计
根据超声波模块触发和信号读取的要求,使用单片机与其进行通讯,并进行测量距离的计算,根据机器人当前的状态控制机器人的下一步运动状态。
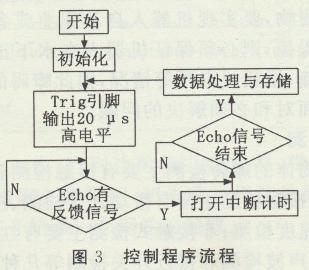
控制程序流程如图3所示,首先定义好端口和功能寄存器,然后给超声波模块发送20μs的触发信号,接着等待检测反馈信号。在此通过设置定时器参数,使用单片机的定时器中断作为计时基准实现测量信号反馈时间的计时统计。计时完毕后将测试数据代入公式(1)进行障碍距离的计算,并对数据进行判断和处理以决定机器人下一步的运动控制方式,从而达到障碍检测和避障运动控制的目的。
4结束语
水下清污机器人的障碍检测和避让可以用各种不同的方法来实现,在运动速度不是很高以及对控制精度要求不高的情况下,采用水面随动超声波检测及控制的方法很好地实现了水下机器人的清污运动控制。
上一篇:沭阳新城路斜跨钢拱桥设计研究
下一篇:返回列表