王凤梅
(华东交通大学机电工程学院,江西 南昌 330013)
摘要:建立1/4车辆半主动悬架模型,采用模糊PID控制,以减小车辆的垂向振动。通过Sim ulink仿真分析,结果表明,与被动悬架相比较,半主动控制减小了车身的垂向加速度,提高了车辆的乘坐舒适度和操作稳定性。时滞的存在影响系统的控制效果,反馈信号的传输时滞也是不容忽视的,随着传输时滞量的增大, 控制系统性能降低,时滞量过大将导致控制系统失稳。
关键词:半主动悬架;模糊PID;仿真;时滞 中图分类号:TP391.7:U463. 33
0 引言
被动的弹簧减振已经不能满足人们对于乘坐舒适度的要求,半主动悬架能够根据车辆的行驶速度和随机不确定的路面激励做出响应,因此得到越来越广泛的应用。
PID控制是最经典的控制算法之一,广泛应用于工业控制中。单纯的PID控制很难满足系统的控制要求,本文引入模糊控制理论,和PID控制相结合,建立模糊PID控制器,能有效地弱化系统的非线性和参数的不稳定性,达到更好的控制效果。
时滞是控制系统不可避免的存在因素,主要是针对控制对象本身的时滞进行了研究。
反馈信号在线路中的传输需要一定的时间,本文主要是对传输时滞进行分析研究,并进行仿真分析,比较不同时滞下系统的性能改善情况。
1 路面激励模型
路面的不平顺是产生车辆悬架垂向振动的主要因素,本文采用滤波随机白噪声作为仿真模型的输入,其时域数学模型可描述为:

仿真模拟车辆以50 km/h的速度在B级路面上行驶,经过Simulink仿真,可以得到路面的位移仿真曲线,如图2所示。

2 车辆半主动悬架模型
以汽车的半主动悬架为研究对象,建立2自由度1/4车辆悬架模型,如图3所示。
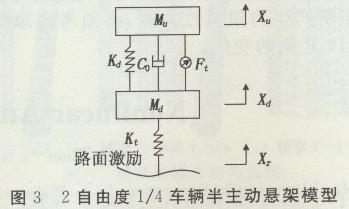
根据牛顿力学定律,半主动悬架系统的微分方程如下:


3模糊PID控制器的设计
PID控制器具有结构简单、参数整定方便、可靠性高等优点,广泛应用于工业生产中。本文采用加速度反馈的方式,实现PID控制。PID控制的数学描述如下:

其中:u(k)为PID控制器的输出;e(k)为系统的误差;K p为比例系数;K i为积分系数;K d,为微分系数。比例环节对响应速度有影响,对控制精度也有一定影响;积分环节显现系统的累积效果;微分环节是系统变化趋势的存在形式。
本文以车身加速度的差值e和其变化率e c作为模糊控制器的2个输入,PID控制器的3个参数作为模糊控制器的输出,模糊论域均为[一3,3],模糊子集为{NB.NM,NS,Z(),PS,PM,PB}。模糊集合的隶属度函数选用三角函数,根据路面不平度引起的车辆实际运行情况建立合理的模糊控制规则。每个输出有49条规则,在模糊规则编辑器中输入模糊规则。
模糊PID控制器结合了模糊控制的灵活性和PID控制精度高的特点,相对于单纯的PID控制和模糊控制,对控制系统有更好的控制效果。在Simulink仿真环境中建立模糊控制器仿真模型,如图4所示。

以模糊控制器的3个输出作为PID控制器的输入,建立PID控制器仿真模型,如图5所示。

4仿真分析
选用某一车型的轿车作为研究对象,其参数如表1所示。在MATLAB/Simulink仿真环境中,建立1/4半主动悬架仿真模型(如图6所示),对车辆模型进行仿真验证。

经过仿真得到车身动位移、车身加速度、悬架动挠度和轮胎动载荷4个性能指标的仿真曲线,如图7~图10所示。

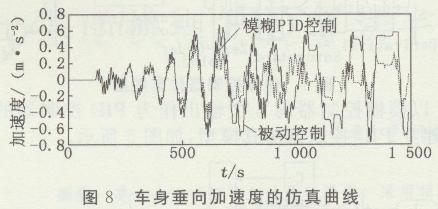


由以上仿真曲线可以看出半主动控制相对于被动控制有明显的减振效果。通过Simulink中的RMS模块求出系统参数的均方根值,如表2所示。
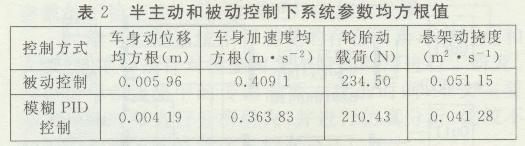
本文针对车辆性能参数的均方根进行了评估,相对于被动悬架,半主动悬架控制使得悬架位移的均方根减小了29. 6%,加速度的均方根减小了11. 1%,轮胎动载荷减小了10. 3%,悬架动挠度减小了19. 3%。从以上数据可以看出,模糊PID控制器能够有效地减小车辆的振动性能,验证了所设计的模糊PID控制器的有效性和可行性。
5 时滞分析
时滞是控制系统中普遍存在的因素,时间滞后导致系统偏离理想状态,使得半主动控制效果有所减弱。半主动控制系统中存在的时滞主要是信号传输过程中的时滞,时滞的存在使得控制系统延时,不能够实现实时控制,导致系统性能变差,车辆的操作稳定性能降低。本文建立含时滞的车辆半主动悬架仿真模型,如图11所示。

不同时滞量对控制系统的影响不同,本文采取时滞为0. 01 s、0.02 s、0.05 s和0.1 s进行了仿真研究,通过比较加速度的均方根值来评估时滞对控制系统的影响。通过计算,得出不同时滞量时加速度的均方根值,如表3所示。

由表3可以看出,当反馈时滞分别为0. 01 s、0.02 s、0. 05 s和0.1 s时,半主动悬架的控制效果不同,随着时滞量的增大,影响也就越大,当时滞达到一定值的时候,系统变得不稳定。
6 结论
(1)车辆行驶路面的不平度是随机性的,本文以随机白噪声作为系统的输入,来模拟随机路面,和实际路况相符。
(2)建立了二自由度1/4车辆半主动悬架模型,Simulink软件仿真结果显示,在白噪声输入的条件下,与被动悬架相比较,采用模糊PID控制器的半主动悬架有较好的性能,有效地降低了车身加速度、悬架动挠度和轮胎动载荷,提高了乘坐舒适度和运行平稳性。
(3)时滞的存在影响半主动悬架的性能,恶化控制系统动态性能。不同时滞对半主动控制系统的影响不同。由仿真结果可知,时滞量越大,系统的稳定性越差,时滞量过大将导致控制系统失稳。
下一篇:返回列表