李琴,郭亮,黄志强,张凯,陶知非
(1.西南石油大学机电工程学院,四川成都610500;
2.中国石油东方地球物理公司,河北涿州072750)
摘要:为了防止震源车在野外行驶过程中发生侧翻事故,实现对震源车危险状态的提前预警,迫切需要开展震源车主动防侧翻预警系统研究。基于震源车不同工况下的侧倾稳定性分析,结合国内外现有车辆侧翻预警指标特点,采用多级判断原则,建立了一种能综合判断不同行驶工况的震源车侧翻预警指标A和主动防侧翻预警系统,并通过MAT-LAB/simulink软件对该预警系统进行仿真模拟分析。研究结果表明:震源车侧倾稳定性随转弯速度、转向角、坡度角等参数的增大而呈现降低趋势;同时,该预警系统能通过侧翻预警指标A实现对震源车平路转向和斜坡转向过程中的行驶状态进行准确判断,并发出不同级别的声光报警。此研究将为进一步开展震源车预警系统的试验研究奠定理论基础。
关键词:震源车;侧倾稳定性;预警指标;主动防侧翻;预警系统
0 引言
震源车作为地震勘探领域的特种车辆,由于其高质心、低稳定性等特点,在沙漠、戈壁等地势复杂环境工作过程中极易导致其发生侧翻、连续翻滚等危险事故,乘员生命安全和仪器设备受到严重威胁,使国家经济财产遭受严重损失。据不完全统计,2006 - 2010年发生侧翻造成的重大伤亡事故10余起,共有20多人伤亡。虽然根据国际HSE标准要求,震源车在驾驶室外安装了一种侧翻保护装置( ROPS),但仍是侧翻事故发生后的被动保护结构,没有起到主动安全保护效果,难以从根本上抑制震源车发生侧翻事故。震源车侧翻已成为影响地震勘探领域的重要问题,设计一种能对不同行驶工况进行准确判断的震源车主动防侧翻预警系统,已成为提高震源车主动安全保护技术研究的重要方向。目前,通过查阅国内外诸多文献,美国IVI公司、法国SECEL公司、中国的BGP公司等国内外主要的地球物理勘探公司对震源车的研究主要集中在振动器性能、信号激发等领域,而针对震源车开展主动防侧翻预警系统的研究鲜有报道。
因此,根据震源车结构特点和实际工况,开展了基于不同参数的震源车侧倾稳定性分析,并结合国内外现有车辆侧翻预警指标特点,以速度为监测值,并将其与临界转弯速度进行对比判断,采用多级判断原则,建立了一种能综合判断不同行驶工况的震源车预警指标和主动防侧翻预警系统,并论述了该预警系统的工作原理,同时,通过MATLAB/ simulink软件对所建立的预警系统进行了仿真模拟分析。该预警系统的建立为提高震源车安全稳定行驶提供有力保障。
1 震源车侧倾稳定性分析
开展震源车侧倾稳定性分析,是建立震源车主动防侧翻预警系统的前提和基础。其中,车辆侧翻是指车辆在行驶过程中绕其翻转轴线转动90。或更大的角度,导致其车身与地面分离接触的一种极危险侧向运动。
1.1 震源车结构
如图1所示,震源车主要由前车体、后车体组成,中央通过铰接转向机构连接。在转向过程中,震源车通过铰接转向机构处左右液压缸的行程差和力臂差而形成的推力,推动前、后车体发生相对偏转而实现转向目的,形成了具有一定角度的转向角,其中,转向角的转向范围为:0。~±30。。而震源车的侧倾角、转向角、转弯速度、质心高度和行驶坡度角等参数影响着震源车的侧倾稳定性。

1.2震源车侧倾失稳机理分析
1.2.1 平路转向失稳
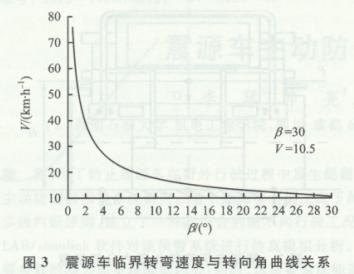
在平路转向过程中,其临界转弯速度v随转向角B的变化而发生变化,当转弯速度超过其极限值时,则会使震源车发生侧翻事故。其中,转向角B是指车辆前车体发生转向后的中心线与未发生转向时的中心线之间的夹角,其大小影响着震源车的侧倾稳定性。震源车平路转向受力分析如图2所示。因此,得到震源车在侧翻临界不稳定状态下临界转弯速度v与各参数之间的关系。

其公式如下:

式中:F为离心力;Ⅳ:为右车轮垂直载荷;M为震源车质量;B为轮距;L为轴距;k为震源车前轴距铰接点距离;H为重心高度。
通过对曲线(图3)分析可知,随着转向角B的增加,临界转弯速度v呈减小趋势,之后逐渐趋于稳定;由于震源车转向角最大转角为30 0,因此,当转向角达到300时,其临界转弯速度为10.5 km /h;当实际转弯速度超过此临界转弯速度时,地面提供的侧向摩擦力不能满足车辆转弯所需的向心力,在离心力作用下使震源车发生了侧翻事故。因此,应合理控制转向角B大小,进而控制临界转弯速度值,实现对侧向加速度及离心力的控制,以防止震源车发生平路转向侧翻失稳现象。
1.2.2 斜坡转向失稳
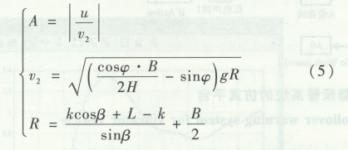
震源车由于其特殊的工作环境,时常行驶于具有一定角度的斜坡上。在斜坡转向过程中,由于震源车侧倾角、自身结构、重力等因素影响,其沿斜坡方向的合力不能提供震源车斜坡转向行驶所需的向心力,最终导致震源车发生侧翻事故。设其斜坡坡度角为沙,通过受力分析可知:

可得:

式中:F为离心力;G为震源车重力;M为整车质量;B为轮距;L为轴距;k为震源车前轴距铰接点距离;H为重心高度;妒为斜坡坡度角。
通过对曲线(图4)分析可知,震源车斜坡转向过程中,随着转向角B和坡度角妒的增加,震源车所允许的临界转弯速度v逐渐降低;当转向角B为30。,坡度角妒为40。时,震源车临界转弯速度减小至3.7 km/h,其值比平路转弯更低。因此,要求震源车斜坡转向时具有较低的转弯速度,一旦速度过大并超过其对应的临界转弯值,极易导致震源车在斜坡上发生侧翻事故。

综上分析,随着转弯速度、转向角、坡度角等值的增大,震源车侧倾稳定性呈降低趋势,当该参数超过其对应的临界值时,震源车则可能发生侧翻事故。因此,深入开展不同参数对震源车侧倾稳定性的影响规律研究,将为建立适用于震源车的预警系统提供方向和指导依据。
2 震源车侧翻预警指标研究
侧翻预警指标是开发研究震源车主动防侧翻预警系统的前提和关键技术。因此,通过对国内外现有车辆侧翻预警指标特点分析,建立了适用于震源车的侧翻预警指标。
2.1 现有车辆侧翻预警指标
目前,国内外科研机构、汽车厂家都针对汽车、重型车辆及工程车辆的侧翻预警系统进行了深入研究。美国、德国、加拿大、日本等国家在车辆侧翻预警领域的研究起步较早并取得了丰富成果。其中,国内外侧翻预警指标主要包括:横向载荷转移率(LTR)、侧翻预警时间(TTR)、侧倾角9、侧向加速度a等指标,但对震源车预警指标及预警系统研究尚处空白。因此,通过对国内外现有车辆侧翻预警系统研究现状分析,得出了不同侧翻预警指标适用范围有所不同,并对以上侧翻预警指标特点进行对比分析,如表1所示。
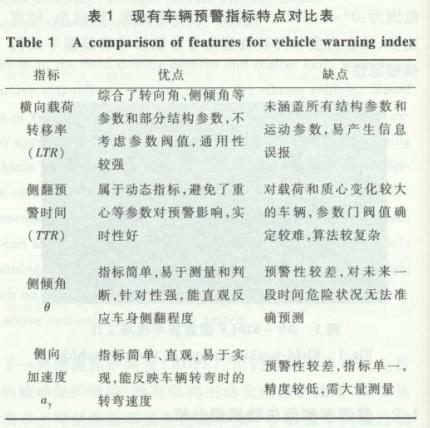
通过分析可知,目前国内外车辆侧翻预警指标多数用于静态的预警系统,不能动态精确预测侧翻程度,且指标单一、测量可靠性差。同时,该指标不能对多种工况进行准确判断。因此,据此为基础,探索一种新型震源车综合性侧翻预警指标成为震源车预警系统的重点研究方向。
2.2 震源车侧翻预警指标
由前文分析可知,临界转弯速度的大小不仅反映了震源车转向过程中的临界条件,也直接影响着震源车的稳定性,且当实际车速超过其临界值,则震源车即将或已经发生侧翻失稳现象。因此,以震源车侧倾稳定性分析为基础,并结合国内外各预警指标特点,建立了以整车速度u和斜坡转向过程中的临界转弯速度v:之商的绝对值为指标的多级判断侧翻预警指标,以通过该预警指标实现对震源车行驶过程中危险状况的判断。将行驶速度与其对应的临界速度进行对比求商,增强了其判断的准确性。同时,由于该指标中包含了转向角卢及斜坡的坡度角妒等动力学参数,因此,该指标可对平路转向及不同角度的斜坡转向等工况的行驶状态进行综合判断。其判断公式为:
式中:v为震源车速度;v:为斜坡转向临界转弯速度。其判断原理为:将预警范围设定为四级;随着A值的增大,震源车的侧倾稳定性呈现逐渐降低;当O<A≤0.6,定义报警级别A=1,为安全级,此时系统发出频率为50,幅值为0.5的绿色的低频声波;当0.6 <A≤0.9,报警级别A=2,系统发出频率为500,幅值为5的蓝色声光报警,实现对驾驶员的初级提醒;当0.9 <A≤1时,报警级别A=3,系统发出频率为1 000,幅值为10的黄色声光报警,实现对驾驶员的中级提醒;当A>l时,报警级别A=4,系统发出频率为1 500,幅值为20的红色声光报警,表明此时震源车已经发生侧翻事故。
该侧翻预警指标采用了将车辆速度M与其临界转弯速度v:进行多级对比判断的方法,能针对不同阶段的安全性发出不同形式的声光报警;具有准确性高,实时性强的优点,能实现对多种工况的侧倾稳定性的综合性判断。该侧翻预警指标的确定为建立一种可靠性高的铰接式震源车主动防侧翻预警系统奠定理论基础。
3 震源车主动防侧翻预警系统原理
根据所建立的侧翻预警指标A,建立了震源车主动防侧翻预警系统,其主要组成为:微处理器、速度传感器、角度位移传感器、惯性测量单元( IMU)、坡度仪和报警装置。其中,角度位移传感器主要监测震源车前、后车体之间的转向角度,惯性测量单元用于监测车辆侧倾角、侧向加速度等参数,坡度仪用于监测斜坡的坡度角。
在预警系统工作过程中,首先运用车载传感器检测车辆状态,包括:速度、转向角、侧倾角、侧向加速度、坡度角等信号参数,监测信号经过A/D转化为数字信号后传递给微处理器,微处理器根据建立的震源车模型,采用多信息融合技术,计算出震源车侧翻预警指标A值,运行侧翻预警算法;将计算的预警指标A值与多级预警范围进行对比,根据震源车的预警级别判断其危险程度,从而发出相应的声光报警,以提醒驾驶员采取相应的防侧翻措施,防止震源车发生侧翻事故,其预警系统工作原理如图5所示。

4震源车主动防侧翻预警系统仿真分析
为了更加直观的掌握预警系统的工作原理,分析该预警指标判断的准确性,实现预警系统的多级预警模式。因此,通过MATLAB/simulink软件针对震源车平路转向和斜坡转向过程,开展震源车预警系统的仿真模拟分析,其预警系统仿真平台如图6所示。其中,速度u输入函数为0~ 10 m/s范围内变化,转向角B输入函数为0。~ 30。范围内变化,如图7和图所示。斜坡的坡度角p分别定义为0。和15。,分别模拟震源车平路转向和斜坡转向行驶过程。



4.1 震源车平路转向过程预警判断分析
根据所建立的预警指标可知,当妒=0。时,震源车在平路工况下进行转向,由此,得到震源车在平路转向过程中预警指标A值变化曲线和声光报警曲线,如图9和图10所示。在0~ 3.3 s范围内,预警指标A随着时间的增加呈现增大趋势,此时预警系统发出不同预警级别的声波报警,但均未出现发生侧翻的红色报警提示;在3.3~4.2 s范围内,预警指标A>l,此时实际速度已经超过其对应的临界转弯速度,导致预警系统发出红色声光报警,表明车辆即将或已经发生侧翻事故;在4.2 s之后,随着速度v的减小,A值也出现明显减小,此时预警系统也发生不同的声光报警。由此可知,该预警指标A能对震源车平路转向过程中的行驶状态进行准确判断。


4.2 震源车斜坡转向过程预警判断分析
根据所建立的预警指标可知,当p= 15。时,震源车在斜坡工况下进行转向,由此,得到震源车在斜坡转向过程中预警指标A值变化曲线和声光报警曲线,如图11和图12所示。在0~2.7 s范围内,预警指标A随时间的增加呈增大趋势,此时预警系统发出不同报警级别的声光报警;在2.7~5.1 s范围内,预警指标A>l,且最大时刻值达到1.4,此时震源车实际速度已远远超过其对应时刻的临界速度,导致该预警系统发出较长时间段的红色声光报警,表明车辆即将或已经发生侧翻事故;在5.1—9.9 s之后,随着车辆速度口的减小,A值也出现明显减小,震源车发出不同级别的声光报警;在9.9~ 10s范围内,预警指标A>l,此时预警系统发出红色报警。由此可知,该预警指标A能准确反映震源车斜坡转向过程中的行驶状态。


4.3平路转向与斜坡转向对比分析
震源车平路转向(妒=0。)与斜坡转向过程(妒=150)中的临界转弯速度和预警指标A值对比曲线如图13~ 14所示。由图分析可知,两种工况的临界转弯速度均随时间的增加呈先逐渐减小,之后趋于稳定;在相同速度和转向角输入情况下,由于斜坡坡度角的不同,即:平路和斜坡的坡度角分别为0。和15。,导致斜坡转向过程的临界转弯速度大于平路转向的临界转弯速度,斜坡转向时的预警指标A值也出现大于平路转向时的预警指标A值,且斜坡转向时的A值率先达到其临界值1。由此表明,震源车斜坡转向过程中具有更低的侧倾稳定性和安全性,更容易发生侧翻。因此,在斜坡行驶过程中,应注意震源车速度、转向角等参数的合理控制,以提高震源车行驶的稳定性和安全性。


5 结论
1)开展了不同参数对震源车侧倾稳定性的影响规律分析;得出:随着转弯速度、转向角、坡度角等值的增大,震源车侧倾稳定性呈降低趋势,当超过其对应的临界值时,震源车则发生侧翻事故;此规律研究为建立震源车主动防侧翻预警系统奠定理论基础。
2)以国内外现有车辆预警指标的特点为基础,建立了以整车速度u和斜坡转向时的临界转弯速度v:之商的绝对值为判断指标的四级判断侧翻预警指标A,以通过该预警指标实现对震源车行驶过程中危险状况的判断。
3)建立了震源车主动防侧翻预警系统,开展了震源车预警系统工作原理分析,得出该预警系统具有更高的可靠性和预警精度,能综合监测震源车整体行驶状态,为进一步开展震源车主动防侧翻预警系统研究奠定理论基础。
4)由震源车主动防侧翻预警系统仿真模拟分析可知:该预警指标A值能对平路和斜坡两工况下的行驶状态进行准确判断,并激发系统发出不同级别的声光报警;同时,得出震源车在斜坡转向过程中具有更低的侧倾稳定性,更容易发生侧翻,驾乘人员应对速度、转向角度等参数进行合理控制,以提高震源车行驶的稳定性和安全性。此分析对提高震源车野外作业的主动安全性具有重要意义。
上一篇:珍珠粉与珍珠层粉的氨基酸组成分析
下一篇:返回列表