作者:郑晓敏
光电设备一直广泛应用于工业生产,在抑制谐波干扰、智能控制方面均已成熟。舰载光电伺服设备应运而生,带有光电自稳定隔离扰动法的光电伺服设备已在某军舰上成功使用,其控制算法中的船摇前馈、速率陀螺反馈视轴稳定分析方法能减小载体运动对跟踪瞄准带来的扰动误差。带有CA模型的前馈控制速度滤波控制系统能减少系统误差,弥补雷达的不足,从而将光电设备跟踪好的目标信息通过武控系统“反引”导弹对抗来袭目标,但没有提到跟踪误差方面的信息;“近似一比较”控制视轴稳定跟踪低空掠海目标的能力有所提高,但也没有涉及目标跟踪误差方面的情况。本文以中波红外跟踪目标加上CA模型最小二乘速度滤波前馈,配合高精度旋转变压器形成双闭环伺服控制系统,其中旋转变压器的精确性影响伺服系统跟踪精度。价格不高的旋转变压器及其集成度高的数据采集模块已经应用于实验室设备,并给出了角度位置一时间曲线图,但没有指明工业方面的应用情况。有限记忆的最小二乘滤波与“近似一比较”超低空控制技术相结合,提出一种稳定跟踪目标角度信息的全息控制策略,在跟踪目标精度方面有了一定的提高。本文的控制方法,用中波红外跟踪目标最大跟踪误差仅为100”。
1 设计原理
1.1 最小二乘法速度前馈
发现所需目标时,调用CA最小二乘滤波函数,将目标角位置数据过滤出速度数据,前馈到速度回路,并与电视脱靶量位置误差码值作运算,实现光电伺服设备的闭环控制。
二阶系统CA最小二乘滤波公式为



标系下的转换值。
由以上转换后的甲板坐标系下的角度数据和艏摇H、纵摇P、横摇R角度数据,得到方位和俯仰的速度扰动,即

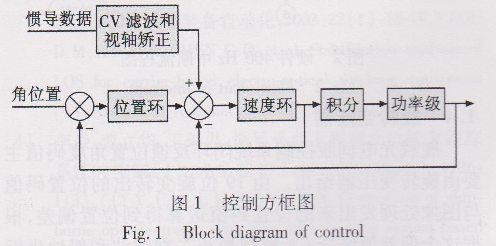
其中:Ac,Ec分别为视轴指向的方位和俯仰角度;Ecp,Acp为视轴速度扰动;ωH,ωp,ωR分别为通过有限记忆最小二乘滤波得到的速度值Ha+1/a,Pn+1/n,Rn+1/a。将校正后得到的视轴方位、俯仰速度扰动EcpAcp,前馈引入到速度回路,即实现了舰载光电搜索跟踪系统的前馈控制,良好的前馈控制能消除系统误差。位置环和速度环采用传统的滞后超前补偿串联控制,根据需要在程序中设置合适的一阶、二阶调节器相互切换,以达到最佳调节的目的,图1为相应的控制方框图。
1.3控制过程
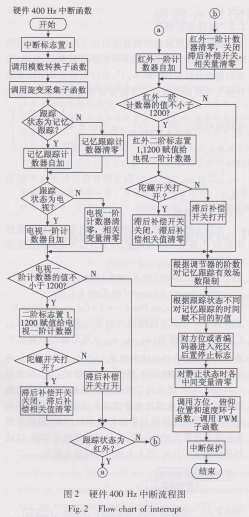
程序中设置循环等待400 Hz中断信号,当400 Hz触发伺服控制电路板时程序运行:400 Hz中断信号则由所设计的硬件电路产生:收到的相关主控脱靶量和收到电视、红外发来的数据的子函数都在各自的中断程序中,由TL16 C754接收和发送。本文主要以控制为主,所以只给出双闭环和产生功率级所需的PWM调用的相关程序,见图2。
1.4旋转变压器
舰载光电伺服控制系统闭环反馈位置角度码值主要由旋转变压器给出。由19位旋变转出的位置码值与图像处理发出来的位置码值运算得到位置偏差,根据这个偏差值结合CA模型最小二乘滤波和船地坐标转换再经过位置速度环调节器的共同调节,输出双极性PWM波对跟踪架进行控制,用以带动CCD相机跟踪目标,所以旋转变压器返码精度高可以提高跟踪精度。旋转变压器在其定子侧施加正弦信号,利用磁耦合关系通过空间相差90'的2个转子感应与之对应的正、余弦电压,并且感应电压大小与输入角度θ的正、余弦成比例,见式(4)。最后模拟输入信号通过数据转换模块转变为数字信号送人计算机,值得注意的是这种数据模块的高位码值与最后解出的角位置码值的低位相当,需要通过编程来实现其解码。

由图3仿真结果可知,CA模型速度前馈在超调量和快速性指标方面均比传统模型有明显提高,超调量提高了大约0. 09,调节时间大约快了1 s。此外,该系统的主控部分采用PC104作为微处理器,保证了该系统稳定可靠地运行,旋变部分使用激磁模块加数据模块,价格与传统的舰载光电跟踪设备相比大大降低。
2试验与分析
图4为某光电伺服设备中波红外跟踪目标的脱靶量曲线,图5为跟踪的目标图。图4中,红线代表实测19 355组的旋转编码器反馈的角度值,蓝线代表对应的脱靶量值。从图中可见,中波红外跟踪目标脱靶量最大为35”,大概出现在行标为6200左右时,其余组段都比较平稳(基本在10”左右),可见19位旋转变压器反馈回来的角位置码值比较精确。

跟踪目标时19位旋变反馈的角度值与脱靶量值相减得到角度合成值,最后用雷达测量的目标实际角度值去掉合成值即得到跟踪目标实际误差值。将19 355组合成值与雷达测得目标实际角度对比,如图6所示。从图6中可见两者基本吻合,如果从数据中看仅仅是小数点第二位开始略有区别,误差曲线如图7所示。
跟踪目标误差值合成误差曲线,从图7中可见中波红外跟踪目标误差在行标为6200左右最大,原因主要是此时的脱靶量突然增大,但是最大为100”的误差完全满足工程中要求误差不超过4'的要求,所以跟踪误差还是比较准确的,再次说明了19位旋变的作用。
由以上分析可知,在中波红外跟踪目标时,前馈CA模型配合视轴船地坐标转换再加上高精度轴角编码器使脱靶量值基本稳定,系统误差大大减小。
3结论
舰载光电伺服设备极易受到横摇、纵摇、艏摇等海面环境影响而导致跟踪精度下降,通过本文中提出速度前馈法完成的双闭环控制系统稳定跟踪,结合船地坐标转换,实现舰面环境下的中波红外远距离跟踪目标,解决了传统双闭环跟踪远距离跟踪目标精度不高的问题。通过理论分析并结合具体试验,该舰载光电伺服系统最大误差为100”,远小于工程所要求4’的跟踪误差,增强了远距离跟踪目标的能力,同时提高了舰载火控系统的综合对抗能力。该设计在工程实践中得到应用,具有较高的实用价值。
4摘要:舰载光电伺服设备由于受到横摇、纵摇、艏摇的扰动,从而对系统的稳态和动态精度会有很大的影响。为解决在海面上远距离跟踪目标精度不高的问题,提出通过CA模型最小二乘法以及船地坐标转换滤波原理,将速度前馈到双闭环伺服控制的速度环中。其位置环、速度环采用一阶、二阶滞后超前串联校正调节器,根据不同的跟踪状态在程序中切换一阶、二阶调节器以达到良好的跟踪效果,最后再加上19位高精度的旋转变压器构成完整的双闭环伺服控制系统,提高了跟踪精度。试验表明:某舰载光电伺服设备使用中波红外跟踪方式远距离跟踪目标,脱靶量最大为35”,旋变反馈角度位置合成值与雷达测得目标实际角度值一致,最大跟踪误差仅为100”,远小于工程中要求4’的跟踪精度
下一篇:返回列表